Sonobot 5 USV
Autonom ytfarkost
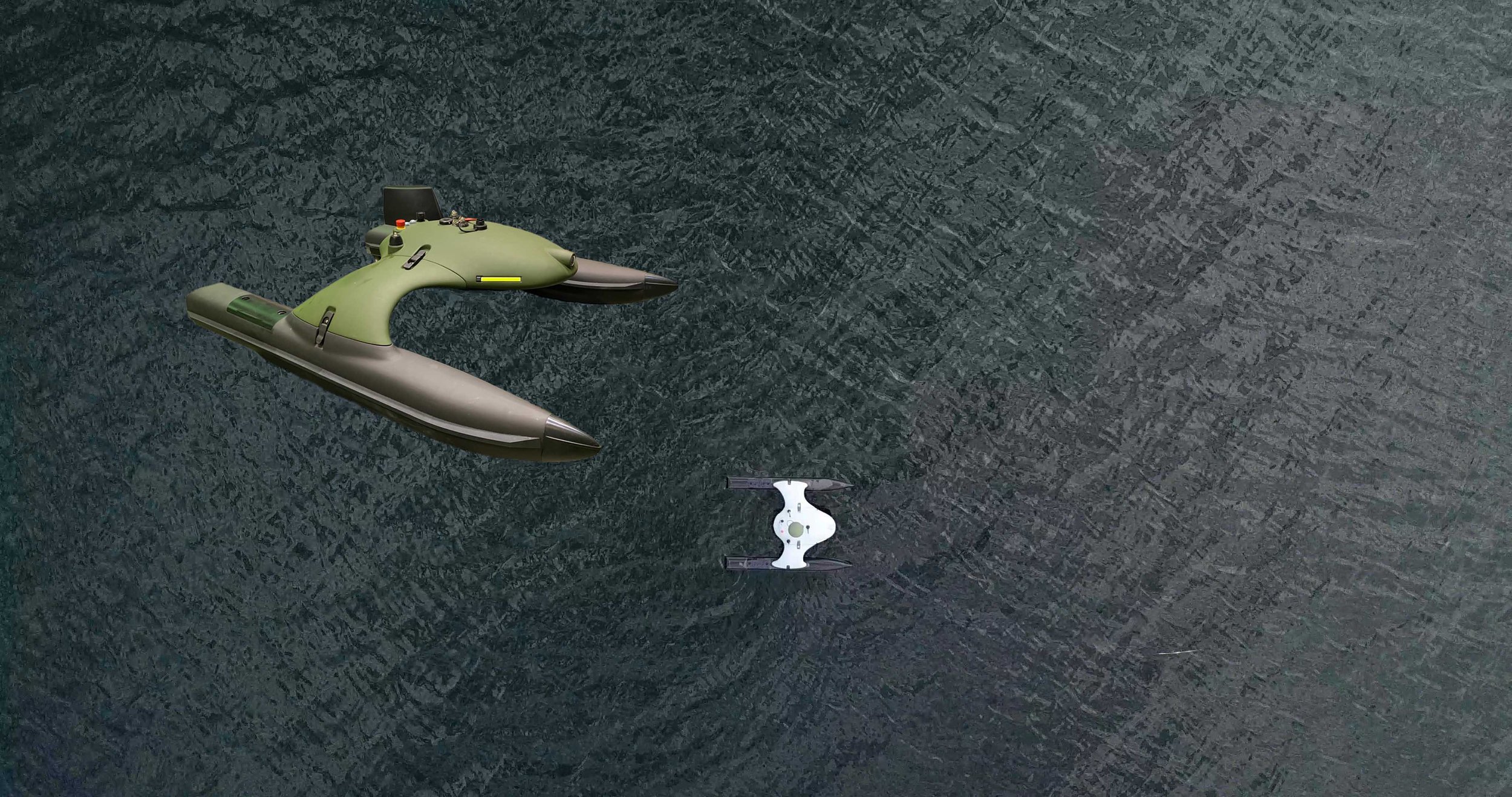
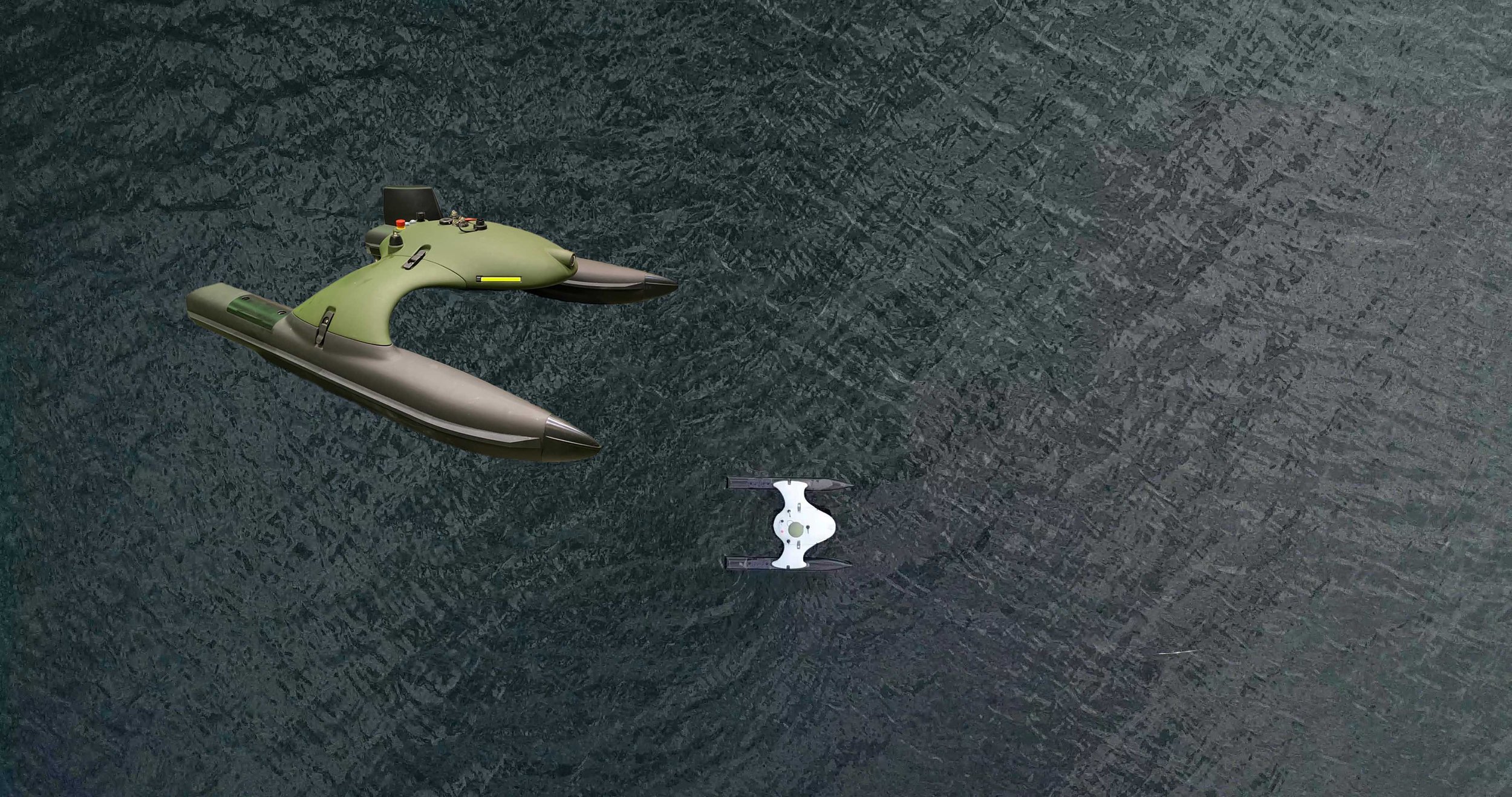
EvoLogics Sonobot 5 är ett avancerat obemannat ytfartyg (USV) som är konstruerat för automatiserade hydrografiska undersökningar, infrastrukturinspektioner, miljöövervakning samt sök- och räddningsinsatser i inlands- och kustvatten.
Den är kompakt, robust och enkel att sätta upp av en enda operatör. Den kombinerar sensorteknik av professionell kvalitet med mångsidiga driftslägen för att leverera tillförlitlig prestanda i olika miljöer.
Tack vare sina integrerade system och modulära utformningsalternativ finns Sonobot 5 i flera olika konfigurationer för att uppfylla uppdragsspecifika krav. Tillval som avancerad bildbehandling, utökad kommunikationsräckvidd och objektigenkänning i realtid utökar dess kapacitet för komplexa eller specialiserade kartläggningsscenarier.
Sonobot 5 effektiviserar driften, minskar inställnings- och hanteringstiden och erbjuder en professionell plattform för datainsamling och uppdragstöd – lika effektivt som fristående verktyg som som del av ett samordnat fordonsnätverk.
Tack vare inbyggda AI-funktioner bearbetar och analyserar Sonobot 5 data på ett effektivt sätt, vilket möjliggör snabbare beslutsfattande och en optimerad resursanvändning. Den omvandlar insamlad data till praktiska insikter, vilket hjälper operatörerna att åstadkomma mer på kortare tid.
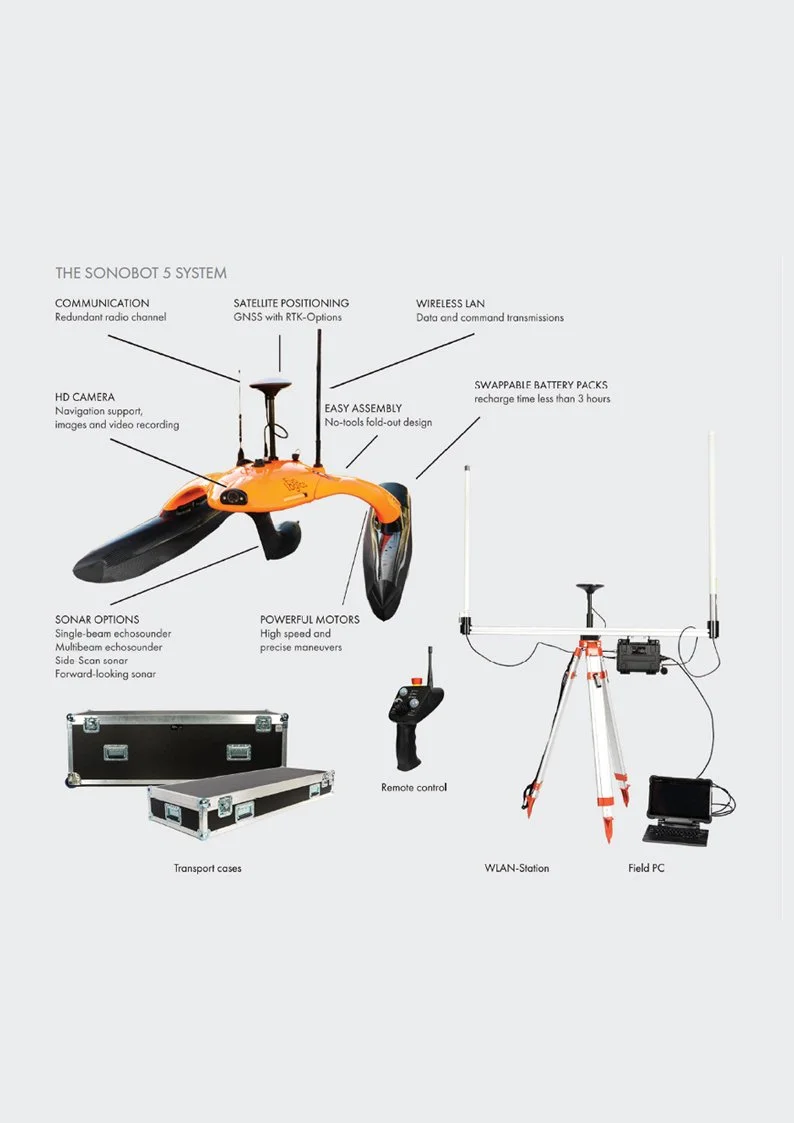
Huvudsakliga egenskaper hos Sonobot 5 USV









Konfigurationsalternativ
Sonobot 5 finns i flera olika konfigurationer, från standardkonfigurationer för kartläggning till avancerade system för infrastrukturinspektion eller stöd till dykare.
Våra experter kan hjälpa dig att välja rätt kombination av sensorer, positionerings- och kommunikationslösningar som passar just dina verksamhetsbehov.
Oavsett om det gäller floder, sjöar eller kustvatten kan Sonobot 5 utrustas för maximal effektivitet och tillförlitlighet.
-
Med ett brett utbud av modulära alternativ bygger vi ett fordon som är exakt anpassat efter de datatyper och den datakvalitet som era uppdrag kräver:
Sonarer
Enstråligt ekolod
Ger djupprofiler för noggrann batymetrisk kartläggning.
Sidoskannande Sonar
Skapar detaljerade bilder av havsbotten och undervattensinfrastrukturen.
Flerstrålig Sonar
Skapar högupplösta 3D-kartor över havsbotten för komplexa undersökningar.
Framåtriktad Sonar
Stöder systemet för hinderundvikande i realtid för säker navigering utan kollisioner.
Bildbehandling
Standardkamera med Full HD-upplösning
Ger navigationsstöd och visuell dokumentation ovanför vattenlinjen.
Full-HD-kamera för undervattensbruk
Möjliggör visuell dokumentation av havsbotten och undervattensanläggningar.
Värmekamera
Ger (passiv) mörkerseende och kustövervakning genom att upptäcka värmeavgivande objekt som inte syns för en vanlig kamera.
Stereokamera
Förbättrar kollisionsundvikande och situationsmedvetenhet genom att ge djupuppfattning och noggrann avståndsbedömning.
LiDAR-sensor
Möjliggör högupplöst kartläggning av strandlinjen och förbättrar systemet för undvikande av hinder.
AI-tillägg
AI-baserad modul för objektigenkänning
Körs direkt ombord på fordonet och analyserar data från sonar videokameror – identifierar och markerar olika objektklasser i styrprogramvaran på land.
Akustik
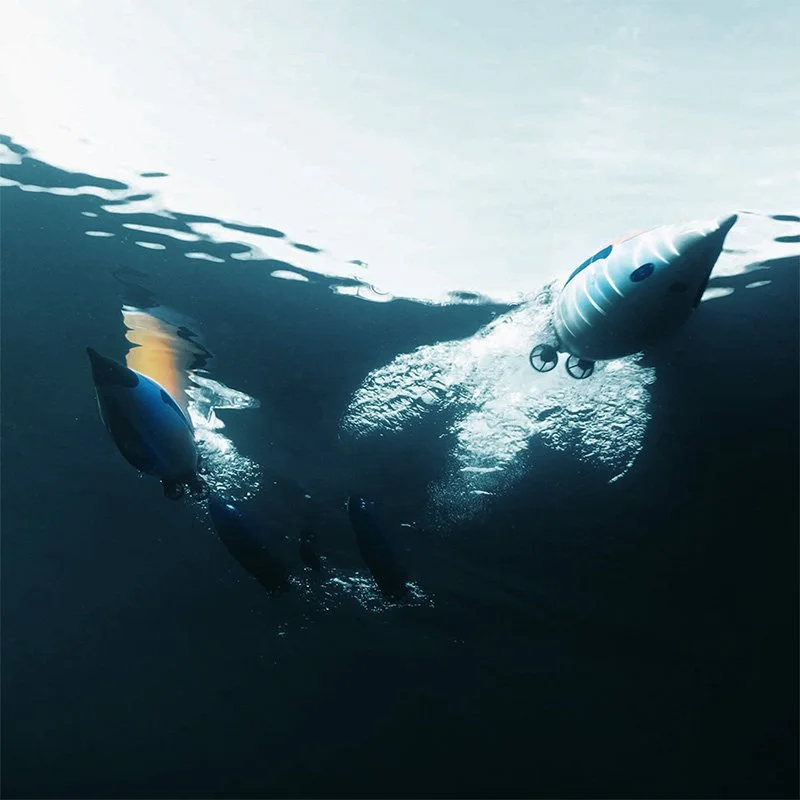
USBL-antennarm
Gör det möjligt för Sonobot 5 att fungera som en mobil ytgateway som kopplar samman undervattensutrustning, dykare och autonoma undervattensfarkoster (AUV) med kontrollcentralen ovan ytan via integrerade akustiska och radiokommunikationssystem. Genom att ersätta stationära ytnoder förenklar den samordningen, minskar driftsättningstiden och utökar uppdragets täckning, vilket ger dykare och autonoma undervattensfarkoster navigering i realtid och tillförlitlig kommunikation.
-
Ett urval av GNSS-baserade och GNSS-oberoende system för att säkerställa att alla sensormätningar georefereras med erforderlig noggrannhet:
Globalt navigationssatellitsystem (GNSS)
Standardpositioneringsalternativ som ger tillförlitliga positionsdata för allmänna kartläggningsuppgifter.
Differentiell GNSS (DGPS)
Förbättrad noggrannhet jämfört med GNSS tack vare satellitbaserade korrigeringssignaler.
Real-Time Kinematic (RTK) GNSS
Uppnår centimeterprecision med hjälp av korrigeringsdata i realtid från en lokal basstation eller en mobiloperatör.
Totalstation
Exakt positionering utan att förlita sig på GNSS-signaler – spårning under broar eller i närheten av höga byggnader där satellitmottagningen blockeras.
-
Upprätthåll en stabil förbindelse mellan Sonobot 5 och kontrollstationen under hela uppdragets räckvidd:
WiFi
Direkt anslutning till fordonet, med en räckvidd på upp till 100 meter.
WiFi med basstation
En antenn monterad på ett stativ utökar WiFi-räckvidden till upp till 1000 m under optimala förhållanden.
Långdistansradio med landstation
Maximal räckvidd vid utökad drift: över 2 km under optimala förhållanden.
Mobilnät (LTE) eller Iridium-satellitförbindelser
Pålitlig uppkoppling även utanför synhåll.
Några exempel på konfiguration av Sonobot 5




Tillämpningar





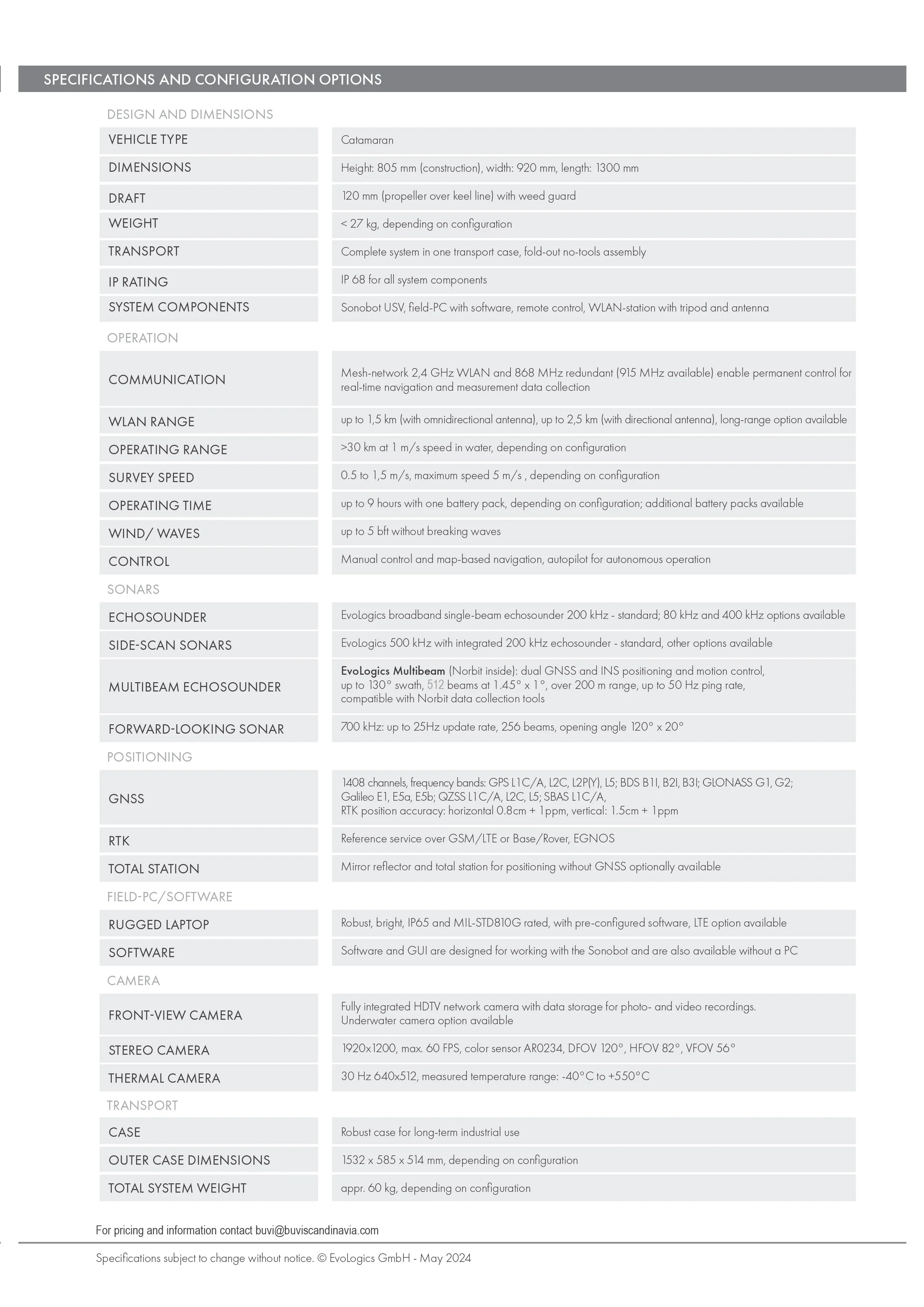
Tekniska specifikationer
-
Typ
Katamaran
Höjd
810 mm (konstruktion), 690 mm (simning)
Bredd
954 mm
Längd
1291 mm
Drag
120 mm (propellern över kölens linje)
Vikt
24–33 kg, beroende på konfiguration
Transport
Hela systemet i två lådor, montering och demontering utan verktyg
Skyddstyp
IP 68 för alla komponenter
Komponenter
Sonobot USV, fältdator (ingår ej) med programvara, radiostyrning, landstation med stativ och antenner
-
Kommunikation
Mesh-WiFi-nätverk (2,4 GHz), redundant radiokanal 868 MHz (915 MHz som tillval), styrning i realtid
Wifi-antenn
Upp till 800 m i alla riktningar, 1,5 km riktad, 2+ km med StreamCaster-radio (tillval)
Arbetsområde
>30 km vid 1 m/s beroende på konfiguration
Mätning av hastighet
0,5–2 m/s över marken
Vind / vågor
Upp till 5 Bft, inga brytande vågor
Kontroll
Manuell och kartbaserad navigering, autopilot i autonomt läge
-
Ekolod
EvoLogics S2C, mittfrekvenser 80/100/200/400 kHz
Sidoscannande sonar
EvoLogics 500/200 kHz (kan kombineras med ekolod)
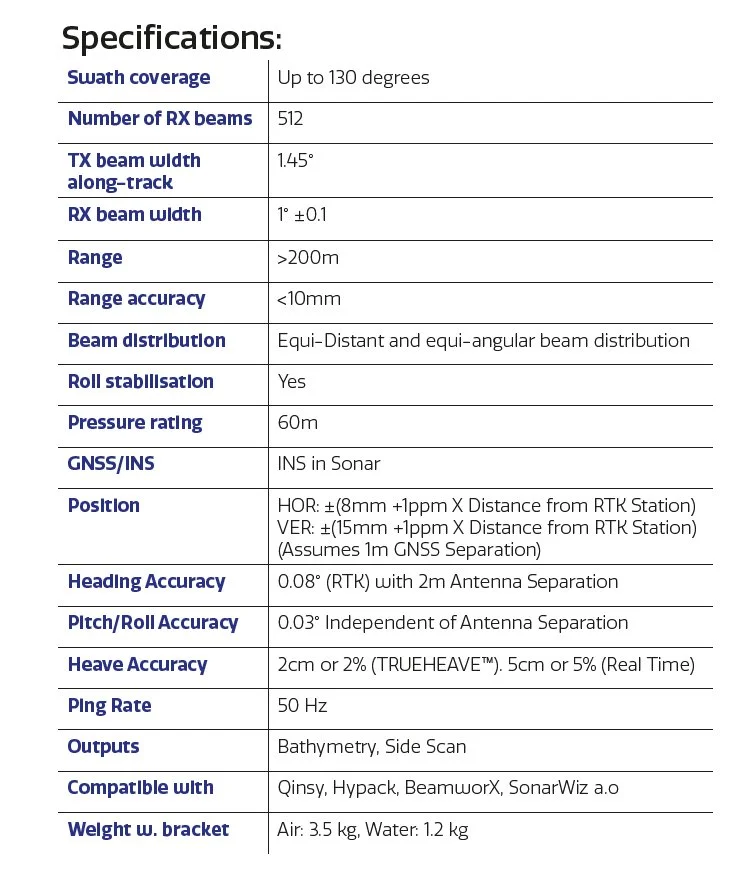
Flerstrålig sonar
EvoLogics MBES (Norbit), täckningsvinkel upp till 130°, 512 strålar med en vinkel på 1,45° × 1°, räckvidd över 200 m, sändningsfrekvens upp till 50 Hz, kompatibel med Norbits dataverktyg
Framåtriktad sonar
EvoLogics 700 kHz, up to 40 m range, < 8 mm resolution, 120° × 90° view, 256 beams, 25 Hz max update, 15° mounting angle downwards
-
GNSS
1408 kanaler; GPS L1C/A, L2C, L2P(Y), L5; BDS B1l, B2l, B3l; GLONASS G1, G2; Galileo E1, E5a, E5b; QZSS L1C/A, L2C, L5; SBAS L1C/A
RTK
Referens via GSM/LTE eller basstation/rover; EGNOS; horisontellt 0,8 cm + 1 ppm, vertikalt 1,5 cm + 1 ppm
Totalstation
Spegelreflektor och totalstation finns som tillval för positionering utan GNSS
-
Robust dator
Robust konstruktion, skärm med hög ljusstyrka, IP65- och MIL-STD810G-klassad, förinstallerad programvara, LTE/GNSS som tillval
Programvara
Särskild styrprogramvara för Sonobot; förinstallerad eller tillgänglig som fristående licens för hårdvara från tredje part
-
Standardkamera
Helt integrerad HDTV-nätverkskamera, lagring av bilder och video
Undervattenskamera
Tillval i vattentät kapsel, 45° nedåt, 111° vidvinkel, Full HD, bilder i realtid, manuell styrning eller styrning via Neptus, foton/videor sparas separat
Värmekamera
640 × 512, 30 Hz, -25 °C till +150 °C, 13 mm objektiv, synfält 45° × 37°, drifttemperatur -15 °C till +50 °C
-
Fall
Robust konstruktion för långvarig professionell användning
Yttermått
1532 × 585 × 514 mm, beroende på konfiguration
Totalvikt
Cirka 60 kg, beroende på konfiguration

Militär, säkerhets- och övervakningslösningar


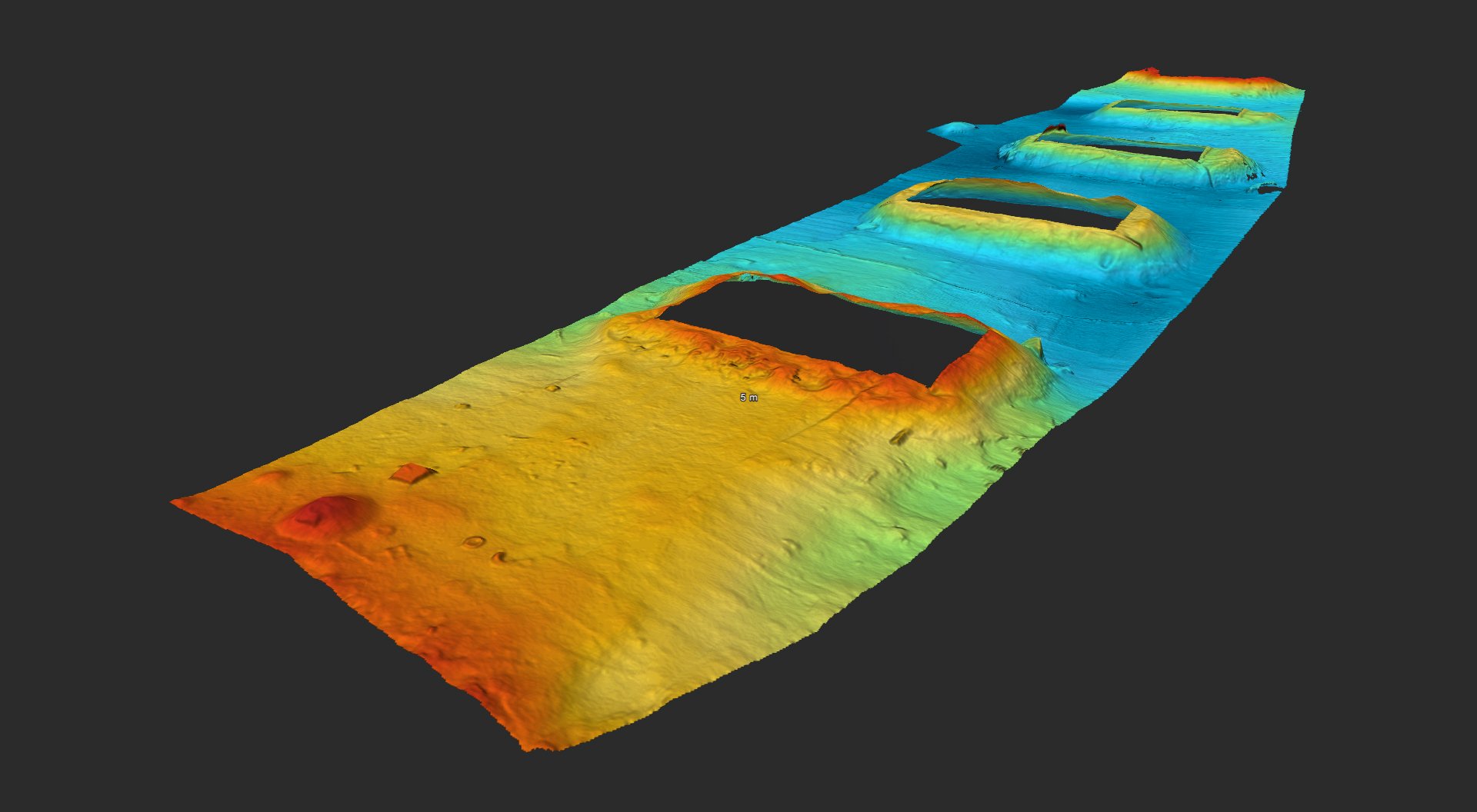









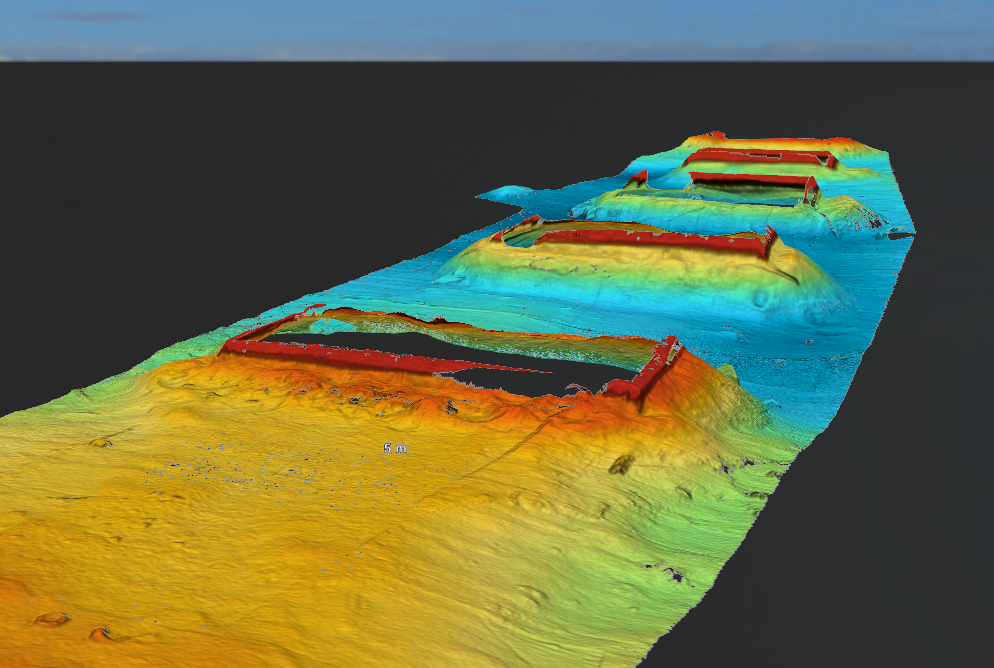
Hydrografiska undersökningar och visualisering av havsbottenförhållanden
Utrusta SONOBOT USV med Sidescan sonar eller Multibeam.
Samla in data från undersökningar och kartläggning med den precision som en Sonobot USV kan ge dig. Anpassa efter dina uppdrag.
Olika typer av sjömätning:
Kartläggning av havsbotten i vattendrag, sjöar och hamnar
Hitta kablar och vrakdelar
3d-modellering av botten
Volymberäkningar
Inspektion av marina konstruktioner
Sök och lokalisera på ett säkert sätt
Undersökningar och kartläggning från 1 - 200 m djup
Sonobot utrustad med multibeam
M7 Integrerat Sonar
M7 är ett mycket mångsidigt, högupplöst multibeam-ekolod som också är extremt enkelt att använda och installera på fordonet. Den tätt kopplade GNSS INS gör den enkel att integrera även i ultrasmå fordon och mycket snabb att mobilisera. Den hydrodynamiska formfaktorn och den låga strömförbrukningen gör den till det perfekta valet för små autonoma ytfordon, inklusive datainsamling.
Den levereras med en högkvalitativ dubbel GNSS- och INS-positionering och rörelsekontroll som är standard för alla Norbits ekolod. Med 512 strålar på 1,45°x1°, en räckvidd på över 200 m och en pingfrekvens på 50 Hz.
FLERSTRÅLIGA BILDER
Brofundament på havsbotten. (Bild: InfraGeaTech)
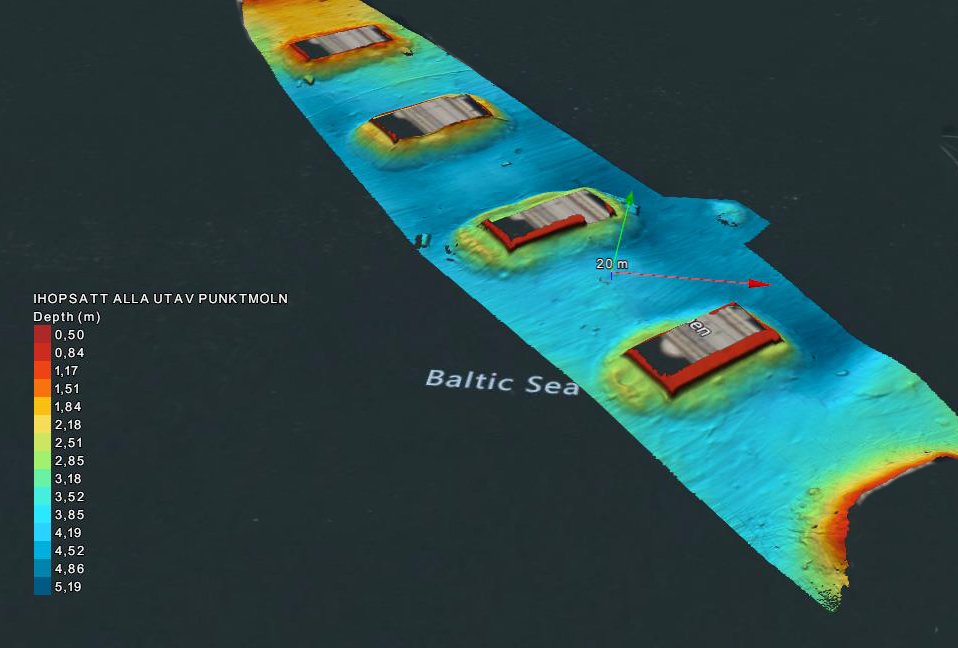
Brofundament på havsbotten. (Bild: InfraGeaTech)
Fairway. (Bild: InfraGeoTech)
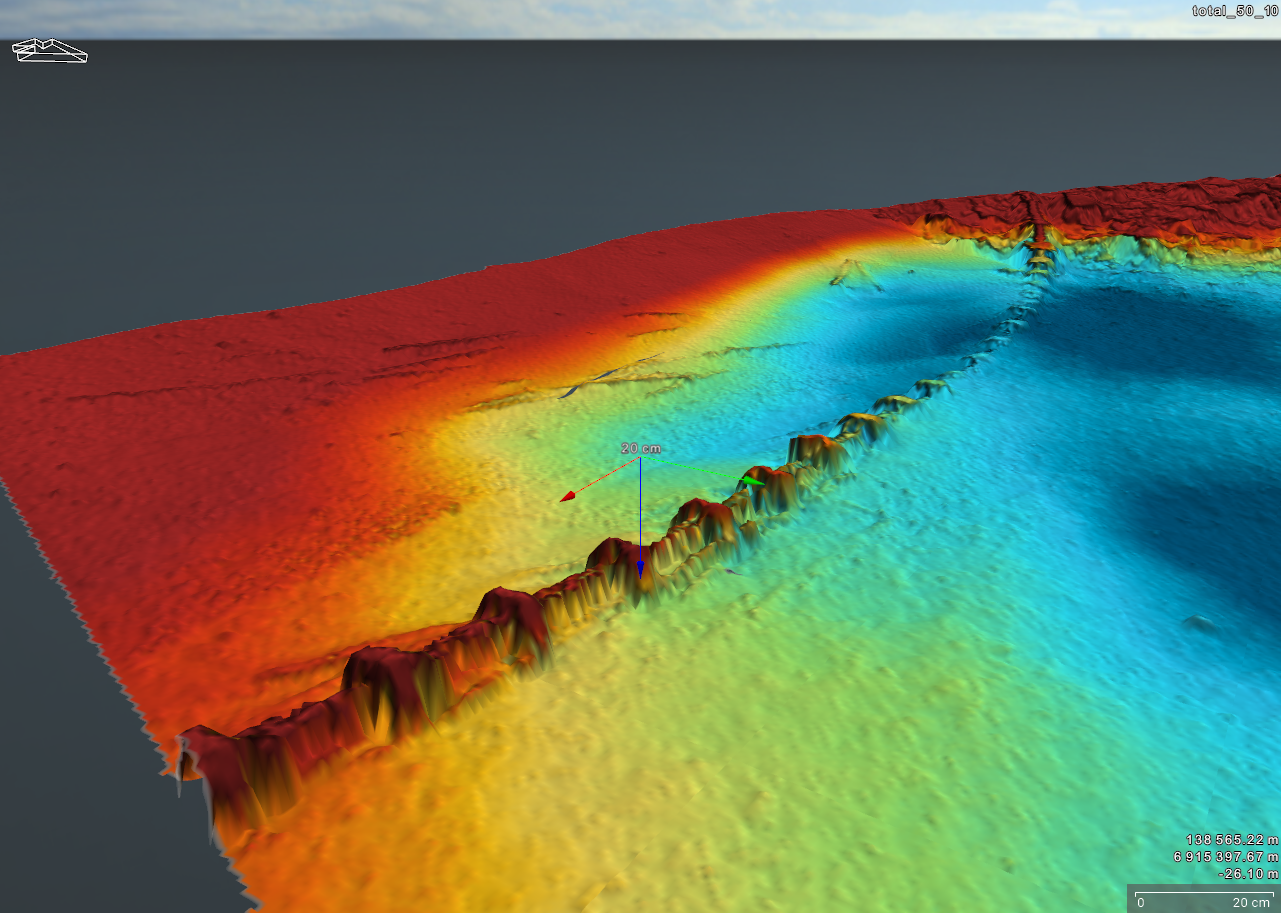
Rör på havsbotten (bild: InfraGeoTech)
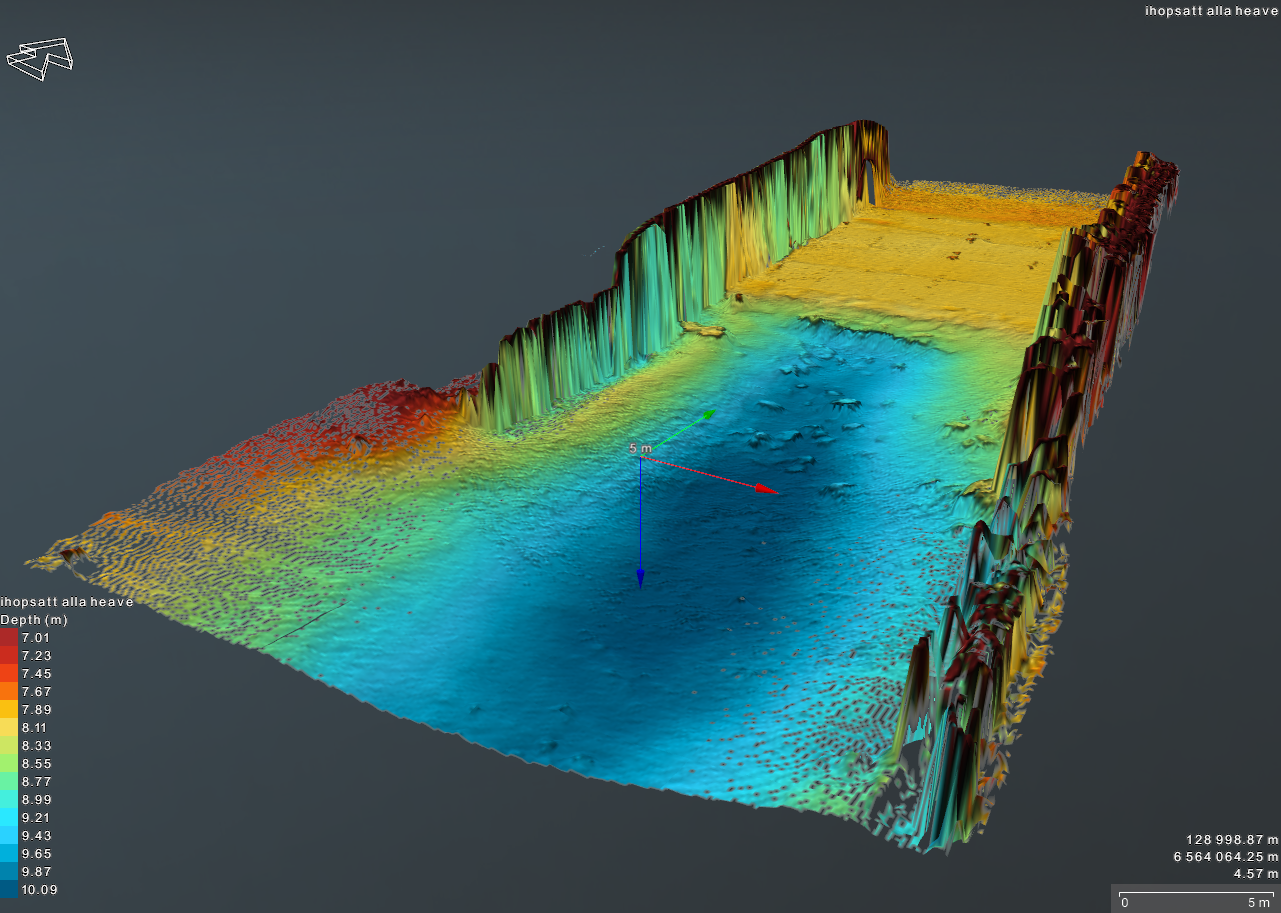
Kajens vägg. (Bild: InfraGeoTech)
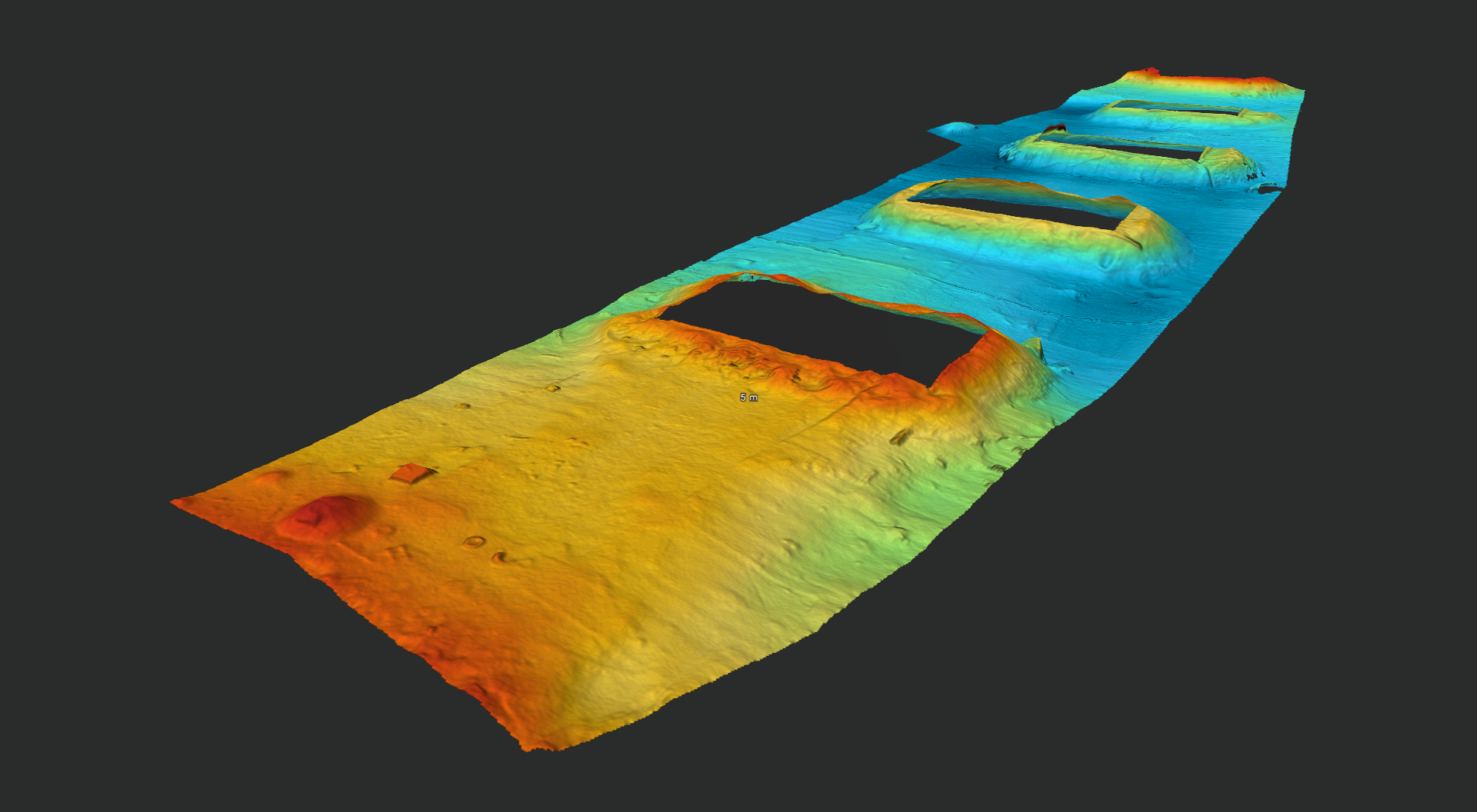
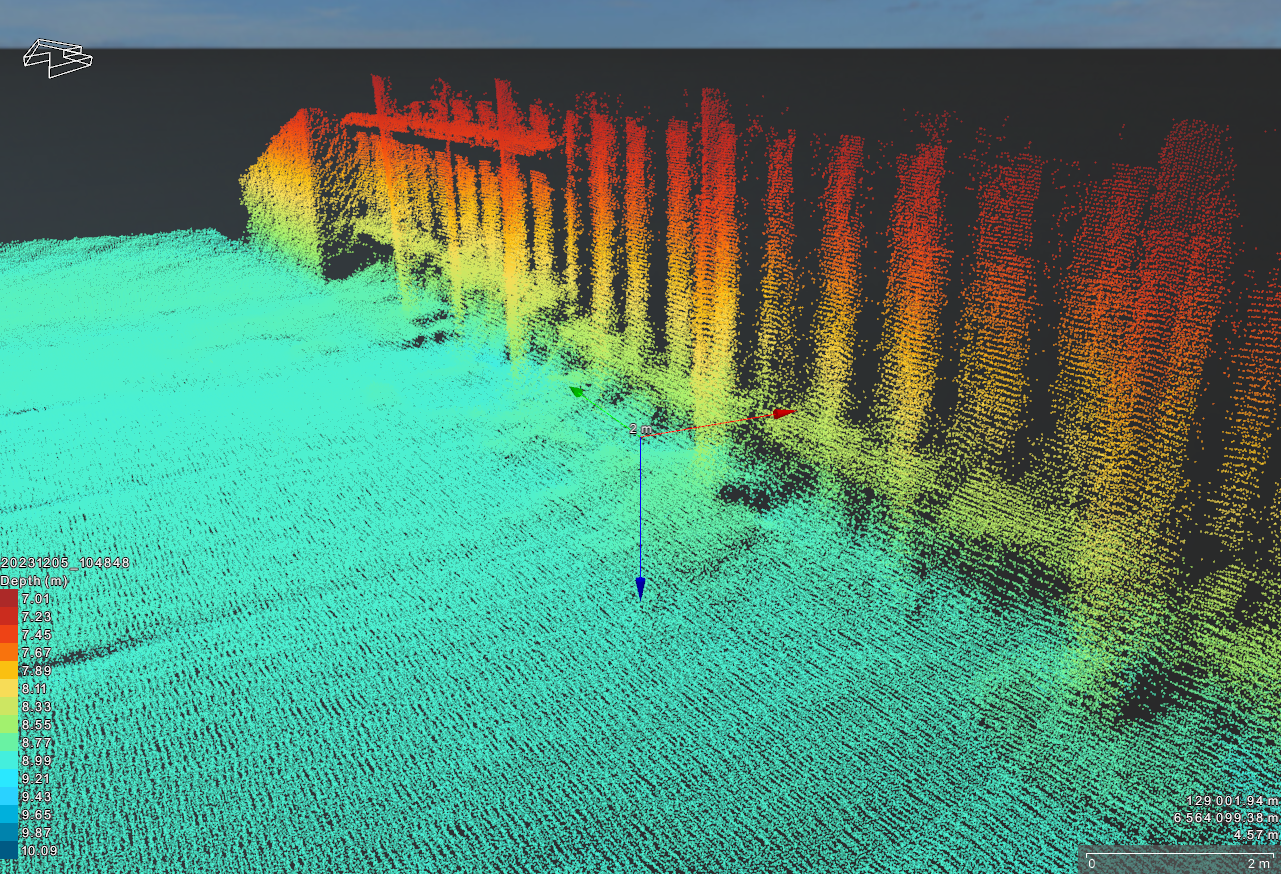
Sonobotdata batymetri och sidoscan
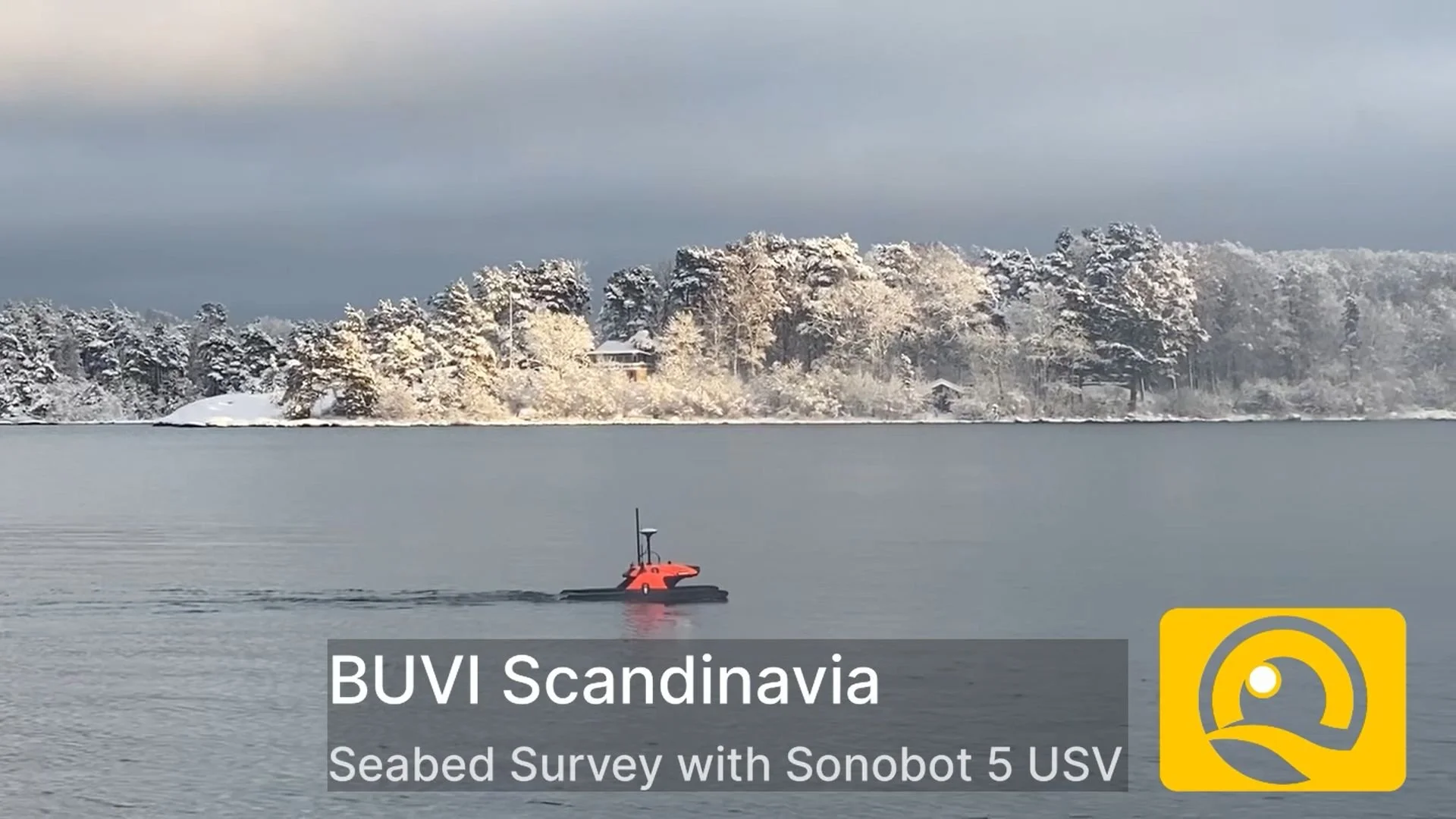
Havsbottenundersökning med Sonobot 5 USV

Sonobot 5 fungerar felfritt även i vinterklimat: under undersökningen klarade batteriet en oavbruten 8-timmarsuppgift i temperaturer mellan –6 och –9 °C.
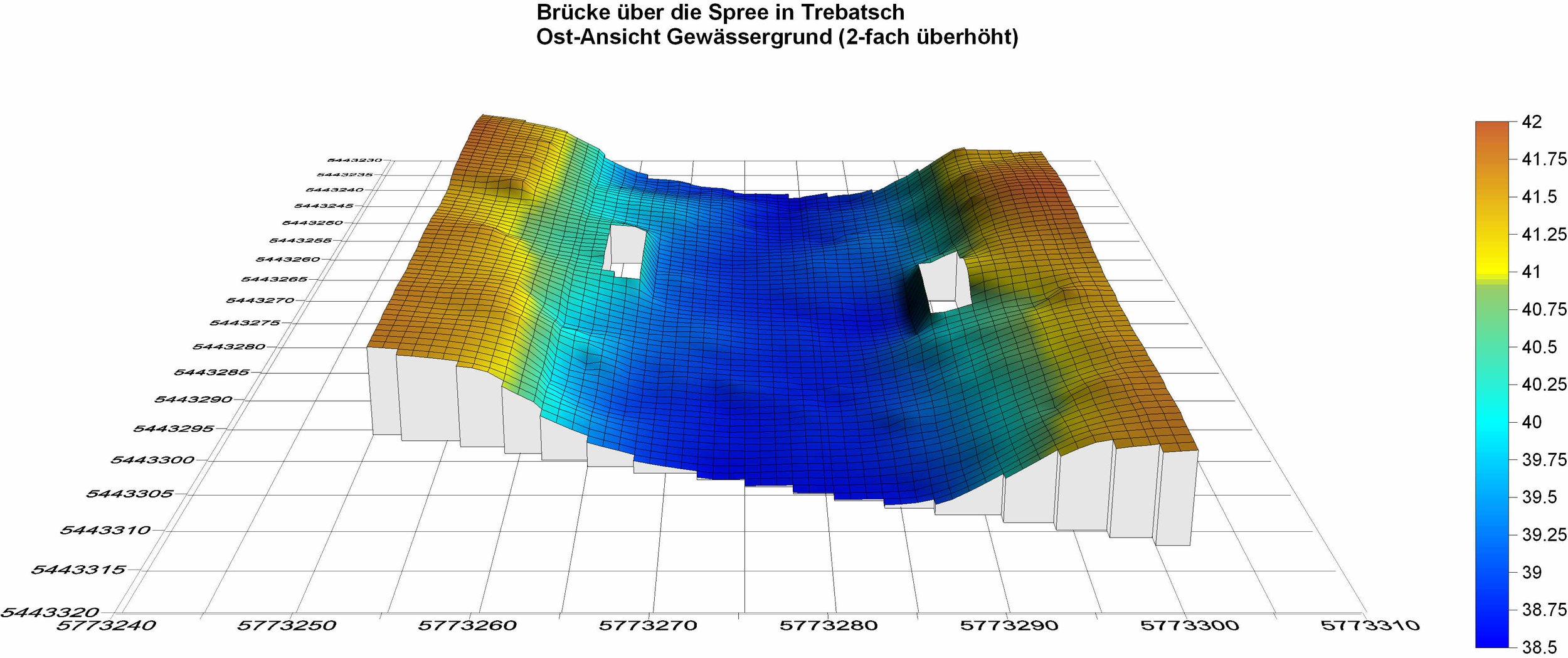
3D-topografisk karta med färgskalor som visar höjdnivåer, märkta på tyska, för ett vattenområde eller landskapsområde med två öppningar eller kanaler.
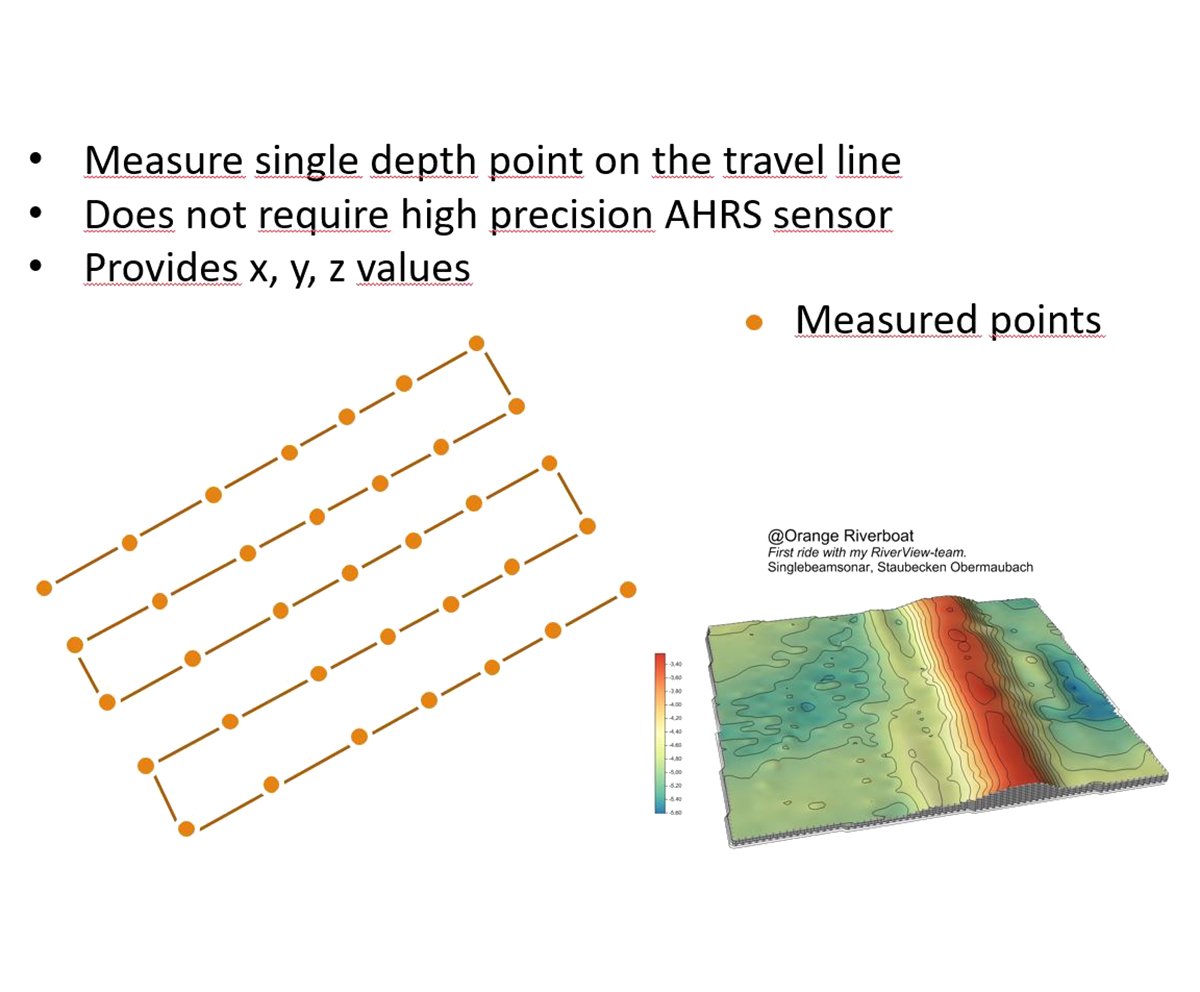
Bild som visar instruktioner för mätning av enskilda djuppunkter på en reselinje, med punktlistor som anger att det inte krävs högprecisionssensorer AHRS och ger x-, y- och z-värden. Innehåller ett diagram över uppmätta punkter som är förbundna med linjer på en 3D-ytplot, med en färgkodad terrängkarta.
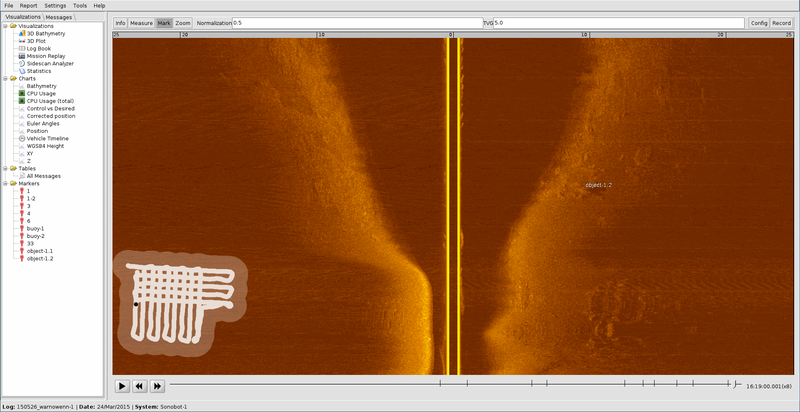
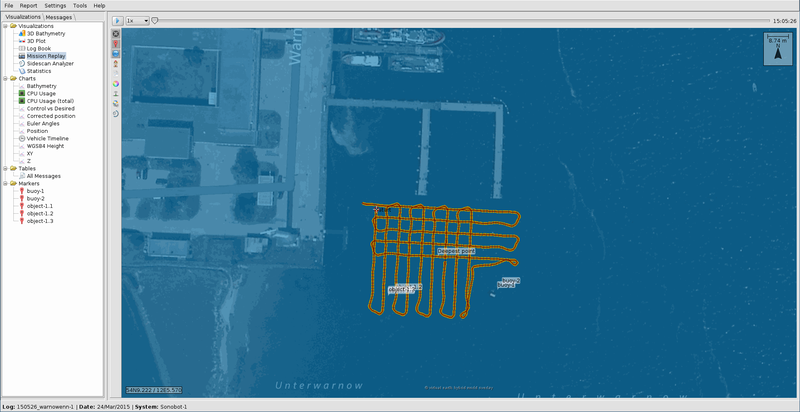
Skärmdump av ett sonar undervattensbildprogram som visar ett rutnät och ett markerat objekt märkt "objekt 1.2" i en orange undervattensmiljö, med en vit kritliknande ritning i det nedre vänstra hörnet.
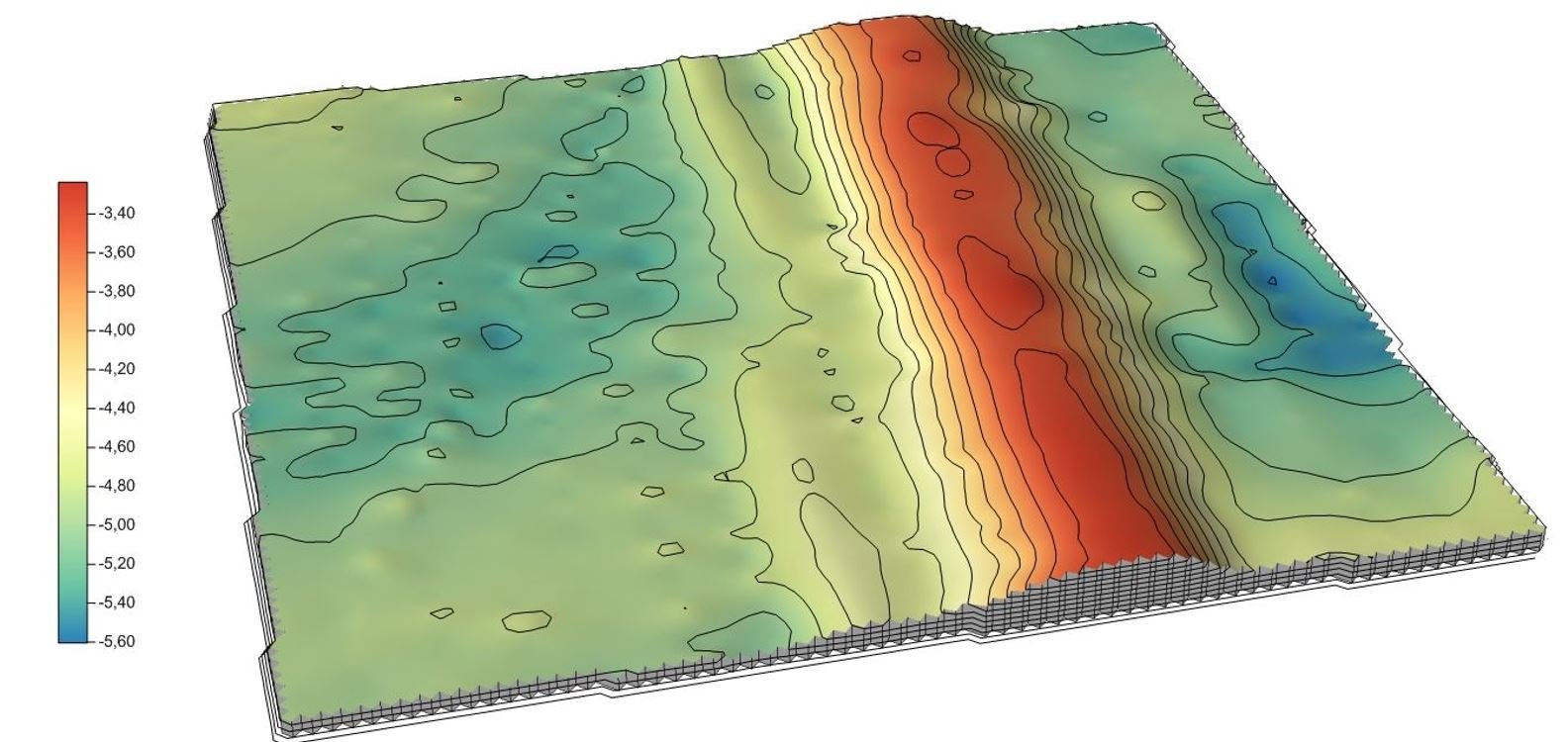
3D-topografisk karta med konturlinjer och en färgskala från blått till rött, som anger höjd eller andra datavärden.
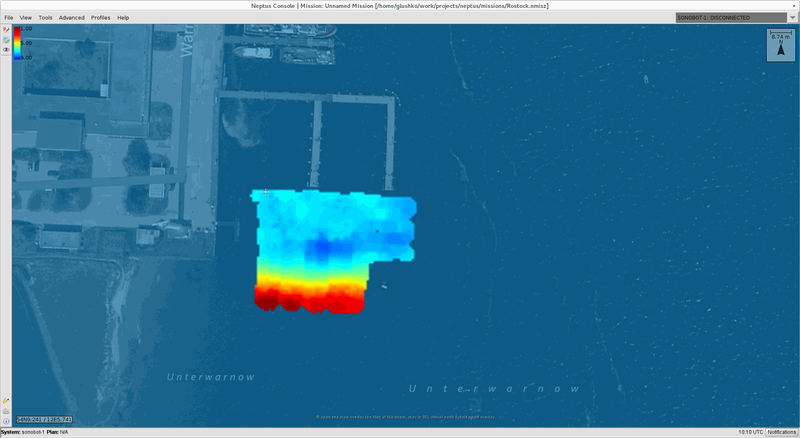
En digital karta som visar en satellit- eller flygbild över ett stadsblock med ett färgkodat överlägg som anger vattendjup eller strömning, där blått representerar grunt vatten och rött representerar djupare vatten i ett specifikt område.
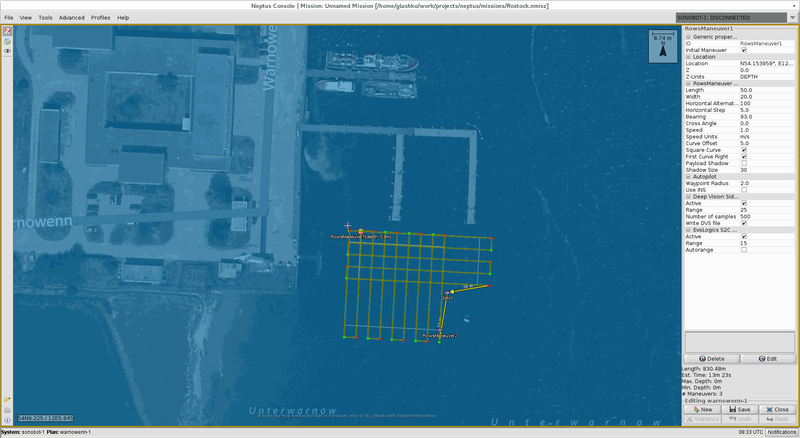
En datorskärm som visar ett program för planering av drönarflygningar med en kartvy, flygvägsnät och olika sensor- och kamerainställningar på höger panel.
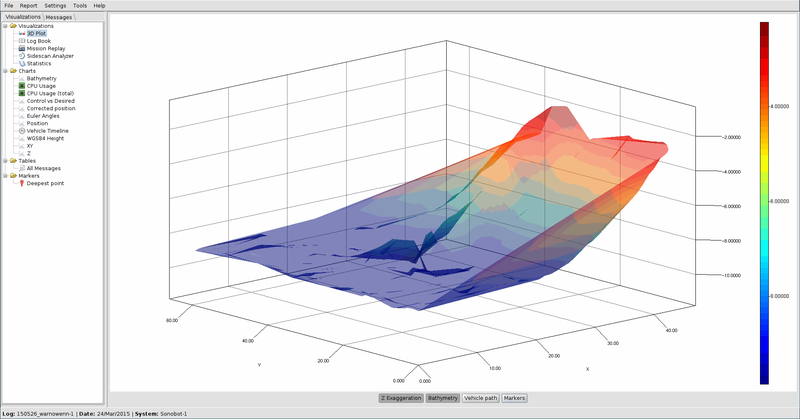
En 3D-färgkodad ytplot som visar data med x-, y- och z-axlar, med en färggradientstapel till höger som indikerar olika datavärden och en sidofält med olika data- och visualiseringsalternativ.
En skärmdump av en flygplaneringskarta för drönare som visar ett rutmönster i orange på en mörkblå bakgrund, med etiketter och en kartförklaring på vänster sida och en kompassros i det övre högra hörnet.
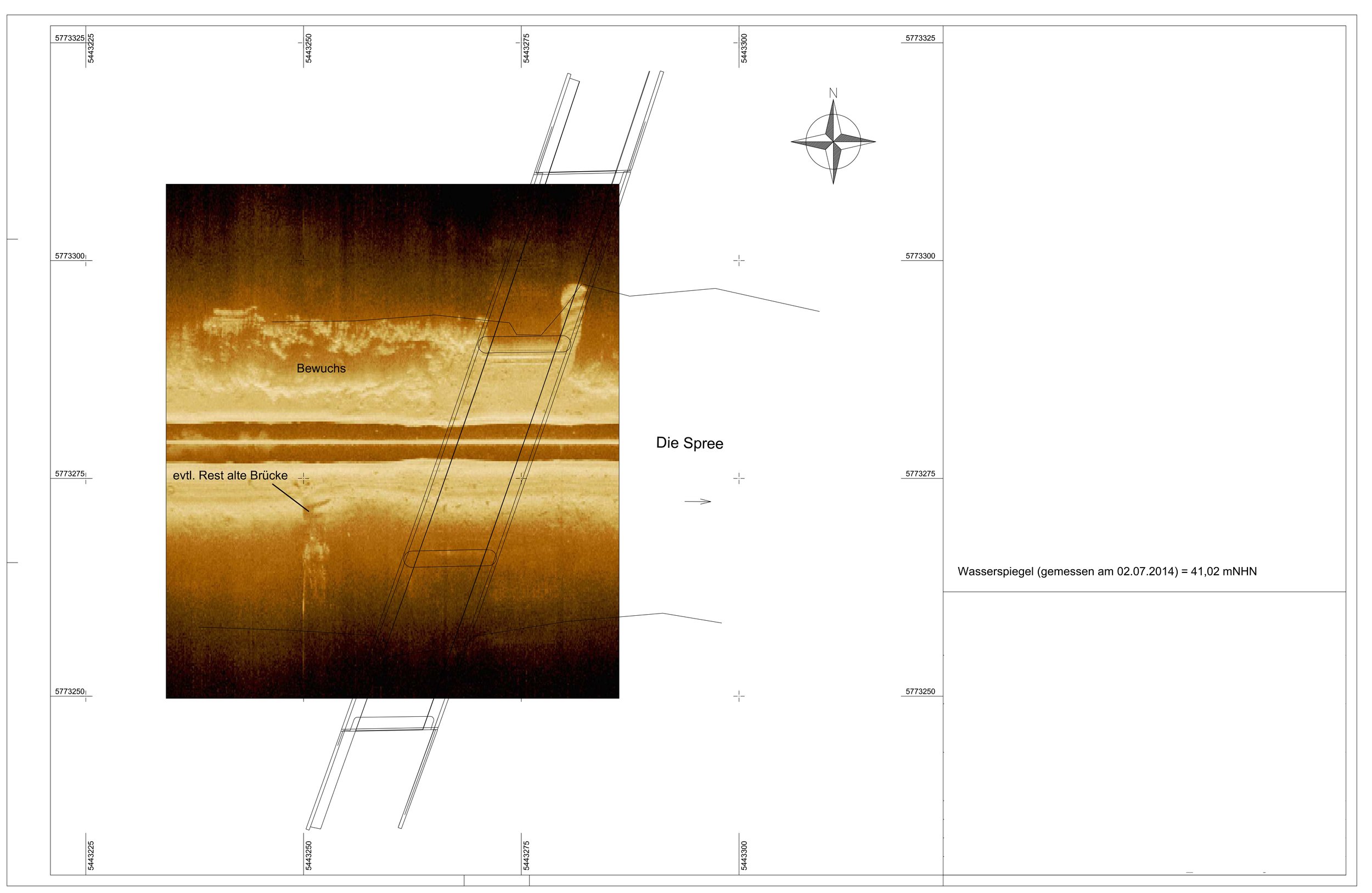
Ett vetenskapligt diagram som visar en nedsänkt broplats med texter på tyska, inklusive termerna "Bewuchs" (vegetation), "evtl. Rest alte Brücke" (möjliga rester av en gammal bro) och "Die Spree" (floden Spree). Det finns anteckningar om vattenmätningar och en kompassros som anger norr.
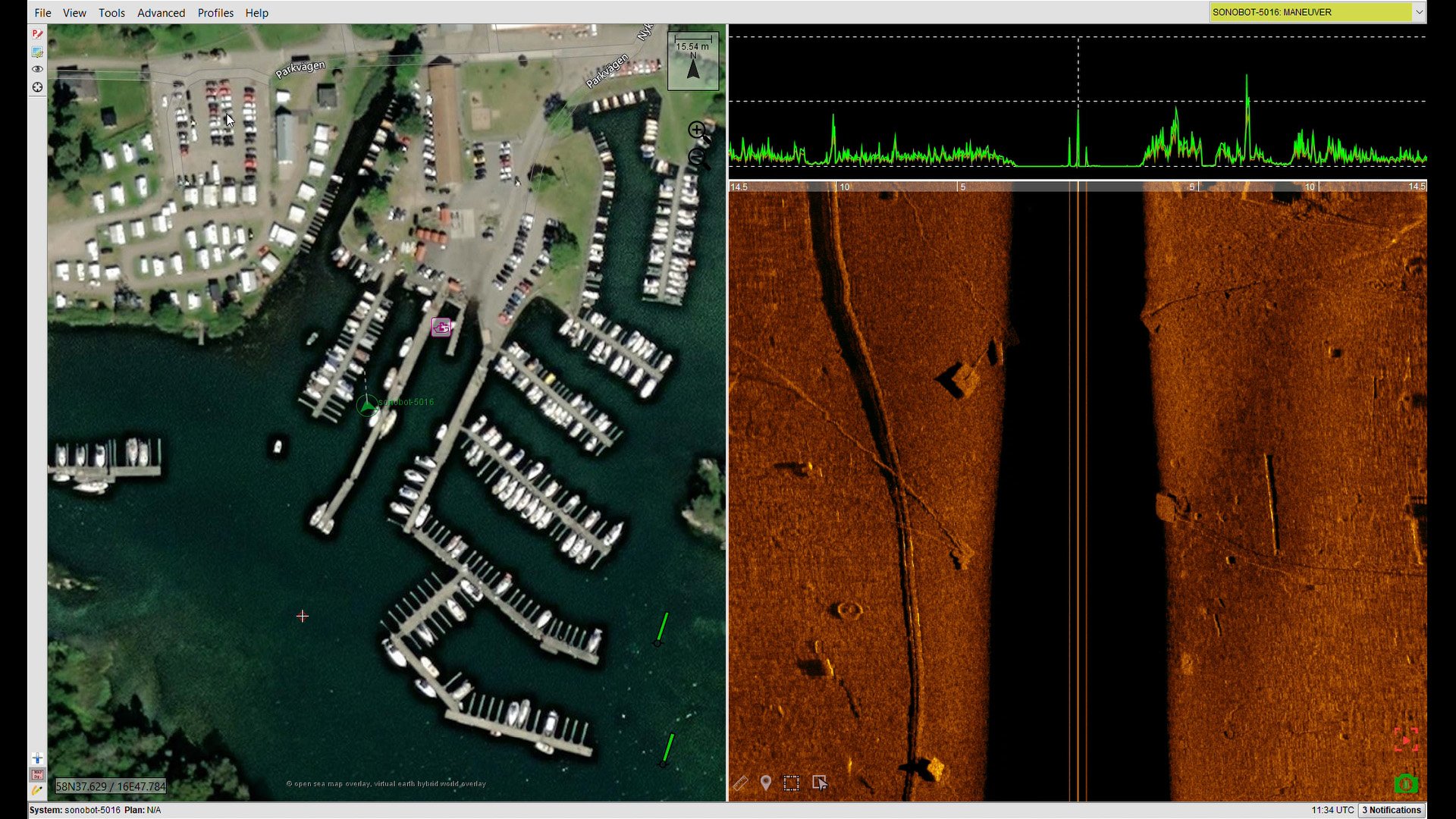
Satellitbild av en småbåtshamn med båtar förtöjda längs bryggor, parkeringsplatser och angränsande byggnader, tillsammans med en sonar visar värmesignaturer från samma område. SOnobot USV och Sidescansonar, BUVI Scandinavia
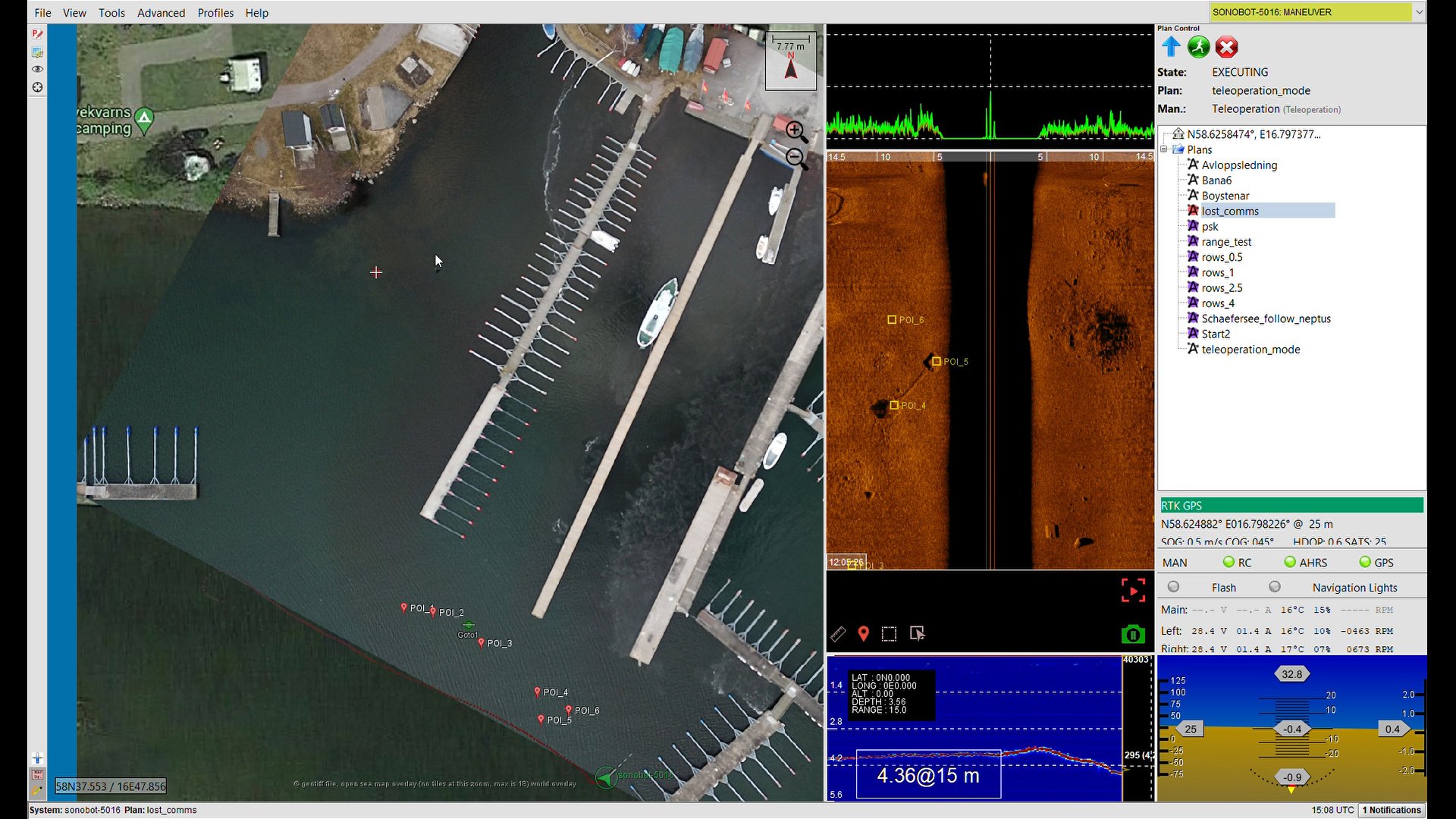
Flygfoto över en småbåtshamn med båtar förtöjda vid bryggor, omgiven av vatten och angränsande mark, med olika mät- och övervakningsdata visade på skärmen.

Objektkännedom -
Objektkännedom -
Objektigenkänning är en avancerad funktion för Sonobot USV och UUV:s.
Det AI-baserade systemet är en extra modul som körs direkt ombord på fordonet och analyserar rå sidoskanning sonar eller videokamerautgångar.
Videor Sonobot 5 USV
Upptäck hur Sonobot 5 USV fungerar i verkliga miljöer
Hyrdrografisk undersökning - Sonobot 5 och Sidescan Sonar
Mångsidighet
Sökning efter minor under vatten Sonobot USV identifiering av objektfunktioner
Objektigenkänning Ai för Sonobot USV
Kartläggning av flodbädden under en bro med Sonobot USV
Sonobot produktbeskrivning
Demo Sonobot 5
Objektigenkänning Ai för Sonobot USV
Sonobot 5 USV presenteras