Poggy – autonom undervattensfarkost
Unika mobilitetsfunktioner för mätning och övervakning
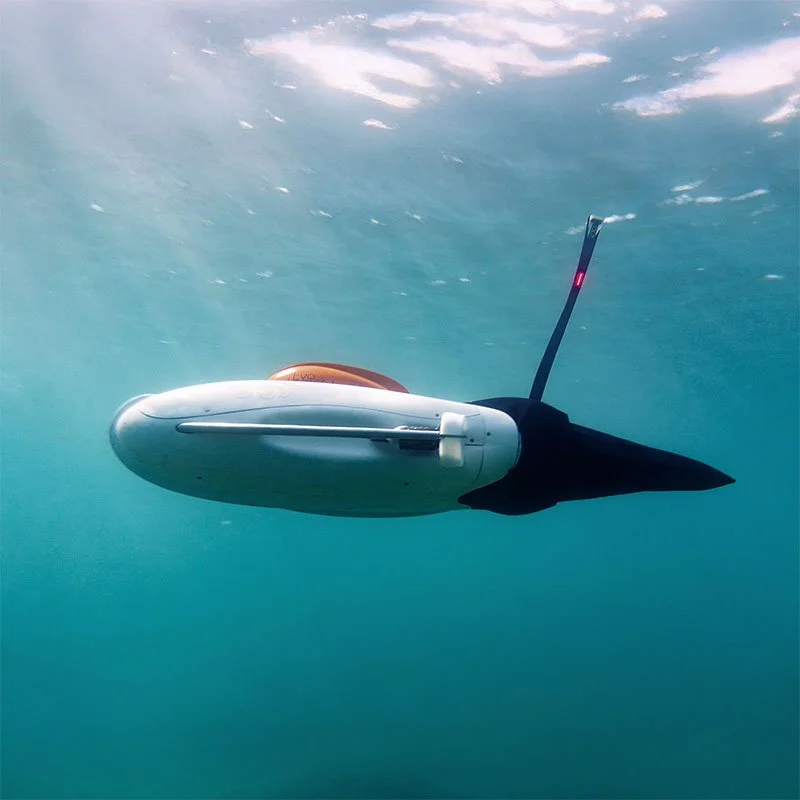
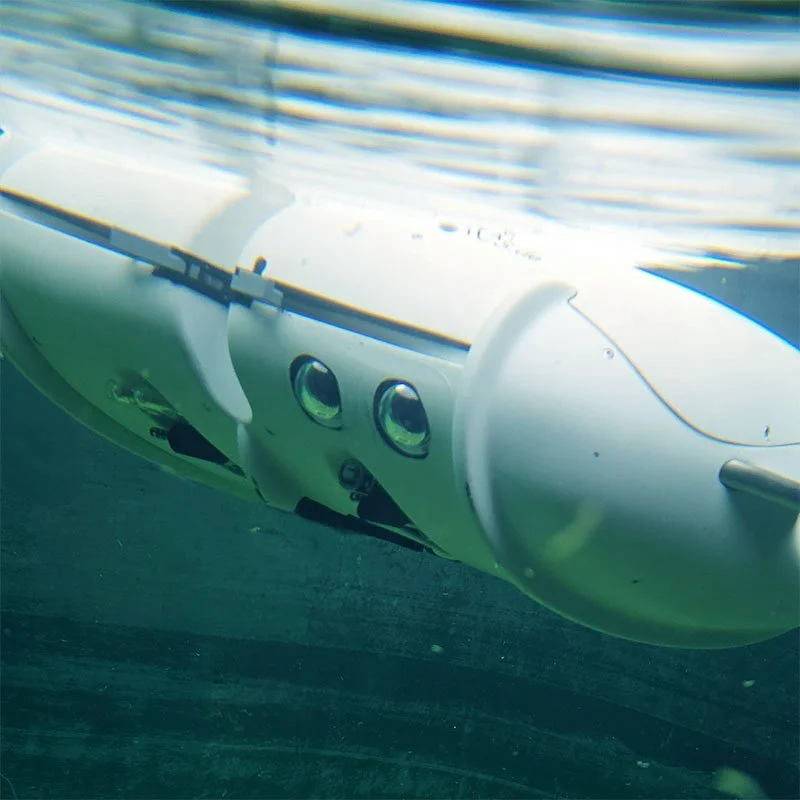
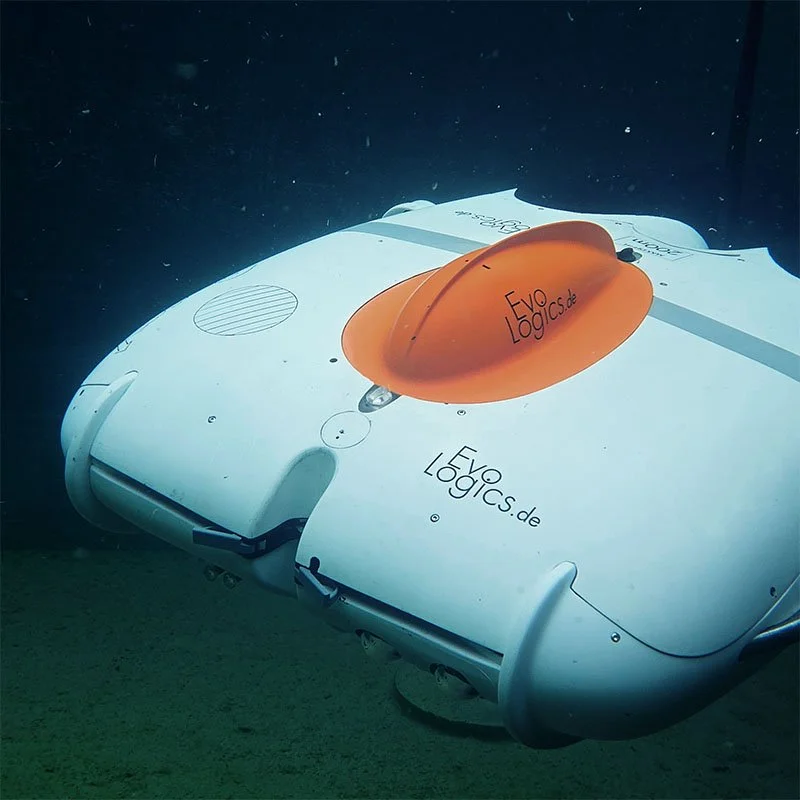
EvoLogics Poggy AUV är ett toppmodernt autonomt undervattensfartyg som är utformat för avancerad kartläggning, marin utforskning och övervakning.
Poggys innovativa bioniska design är inspirerad av naturen och utnyttjar Fin-Ray®-tekniken för att erbjuda oöverträffad rörlighet och kontroll i undervattensmiljöer.
Viktiga komponenter och funktioner
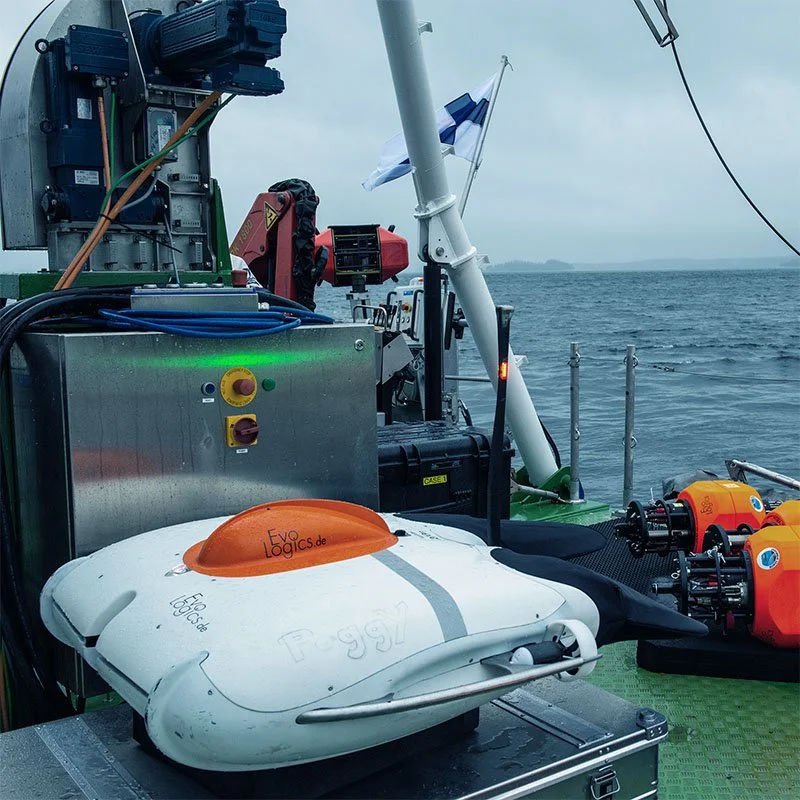
Kompakt design, stor lastkapacitet. Trots sin kompakta form har Poggy en generös lastkapacitet och kan bära flera sensorer, vilket möjliggör multimodal datainsamling under ett och samma uppdrag.
Oöverträffad stabilitet och kontroll. Poggy upprätthåller utmärkt rull- och djupstabilitet även vid låga hastigheter, vilket gör den idealisk för tillämpningar som kräver detaljerad rumslig upplösning, till exempel punktmolnmätningar av komplexa undervattenskonstruktioner.

Bionic Fin-Ray©-svansar. Poggy är utrustad med två oberoende styrda, flexibla svansar baserade på Fin-Ray©-teknik. Dessa svansar möjliggör precisa justeringar av upp- och nedgång, lutning och rullning, vilket underlättar dynamiska manövrer som vertikala stigningar, dyk och plan glidning.
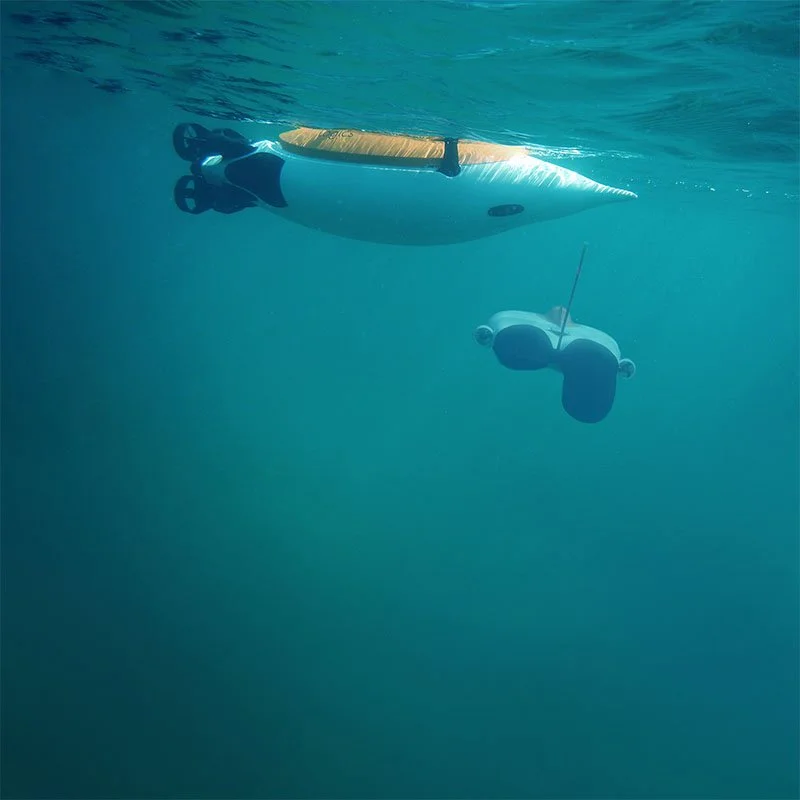
Mobil navigerings- och kommunikationscentral. Förutom att samla in undersökningsdata kan Poggy fungera som en mobil ytgateway som kopplar samman undervattensutrustning med kontrollcentralen ovan vattenytan via sina integrerade akustiska och radiokommunikationssystem. Poggy ersätter stationära ytnoder och kan följa dykargrupper eller spåra AUV:er, vilket förenklar samordningen, minskar driftsättningstiden och utökar uppdragets täckningsområde.

Framdrivning och svävning. En robust konstruktion med dubbla styrraketer ger smidig framdrivning och säkerställer stabilitet även vid komplexa manövrer. Tre vertikala raketer ger full svävningsförmåga, vilket gör att farkosten kan hålla sin position exakt under inspektioner, datainsamling eller vid drift i låg hastighet.
Integration av nyttolast och sensorer
Tack vare möjligheten att transportera flera instrument samtidigt erbjuder Poggy omfattande mätfunktioner utan att det går ut över smidigheten eller uthålligheten.
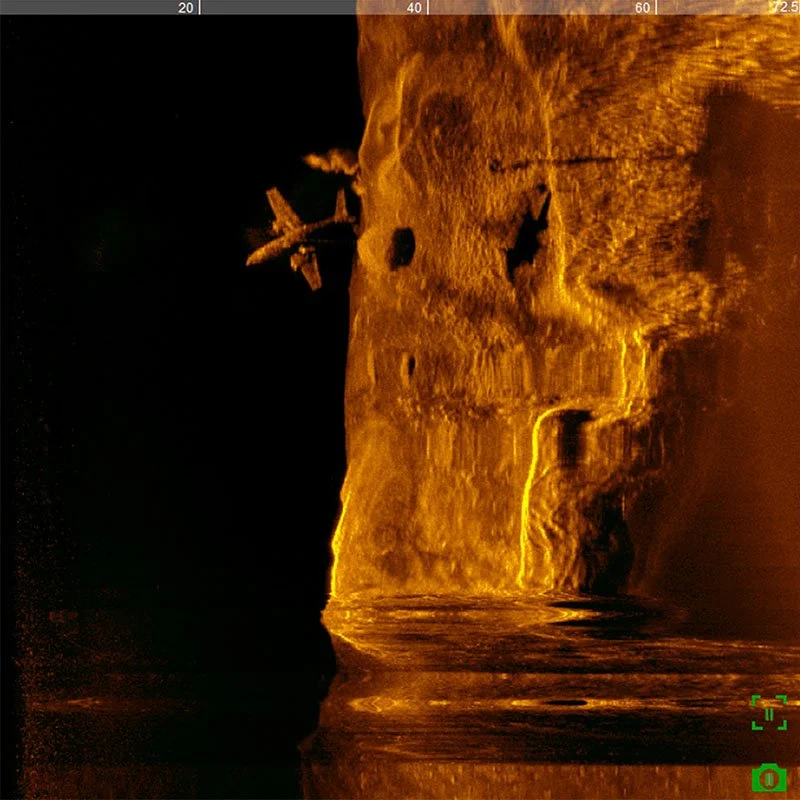
Sidoskannande och framåtriktade multibeam-ekolod. För avbildning av havsbotten och infrastruktur samt smart kollisionsundvikande i komplexa undervattensmiljöer.
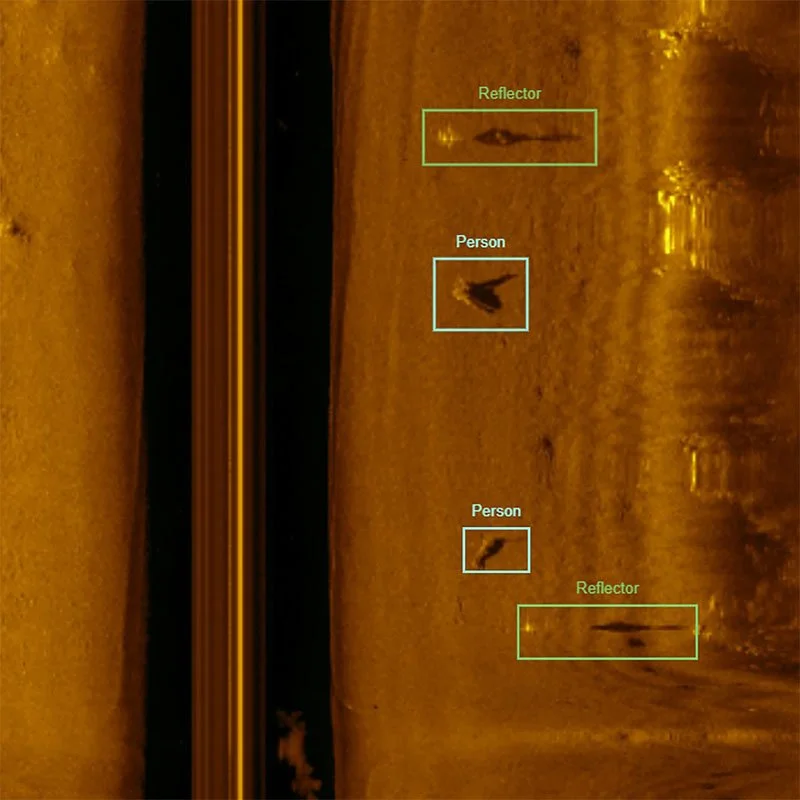
AI-baserad objektigenkänning och kollisionsundvikande. Inbyggd realtidsintelligens identifierar relevanta objekt och möjliggör snabba undanmanövrer för att öka uppdragets autonomi och säkerhet.
HD-kamera och kraftfulla lampor. Ger detaljerad visuell dokumentation för inspektioner, livsmiljöundersökningar och strukturanalyser.
Kommunikations- och navigationssystem för undervattensbruk. Avancerat akustiskt modem med USBL-antenn för exakt positionering och tillförlitlig dataöverföring under drift.

Miljöövervakningssensorer – tillval. Utrymme i lastutrymmet för ytterligare sensorer som samlar in vattenkvalitetsdata för ekologiska och forskningsmässiga tillämpningar, inklusive temperatur, salthalt, grumlighet och andra viktiga parametrar.

GNSS- och radiokommunikationssystem. Ansluten på markytan: GNSS för exakt positionering och en hopfällbar antenn för dataöverföring via WiFi eller mobilnät till kontrollcentralen.

Anpassade nyttolaster. Utrymme för anpassad integration av ytterligare sensorer för specialiserade uppgifter inom forskning, havsbaserad energi, försvar och andra områden.
Optimerad för effektiv enkätgenomförande
Med sin förmåga att glida långsamt och jämnt samt bibehålla önskade lutningsvinklar är Poggy utformad för att leverera tillförlitliga data av hög kvalitet för sonar , batymetrisk kartläggning och objektbaserad analys.