
AI-teknik
AI-baserad objektigenkänning (OR)
AI-baserade system möjliggör automatisk objektdetektering och kollisionsfri navigering för EvoLogics autonoma fordon.
Systemet är optimerat för de begränsade resurserna hos obemannade plattformar, och all databehandling sker ombord i realtid, vilket ger snabb lägesbild för säkra och tillförlitliga uppdrag.
Med adaptiv AI får operatörerna snabbare och mer exakta mätningar, mindre behov av mänsklig inblandning och ökad säkerhet vid uppdrag, samtidigt som fordonets prestanda maximeras.
Objektigenkänningssystemet har genomgått omfattande tester tillsammans med våra utvalda samarbetspartner och finns som tillval för alla EvoLogics kommersiella fordon – inklusive Sonobot 5 USV och Quadroin AUV.
AI-teknik
Objektigenkänning
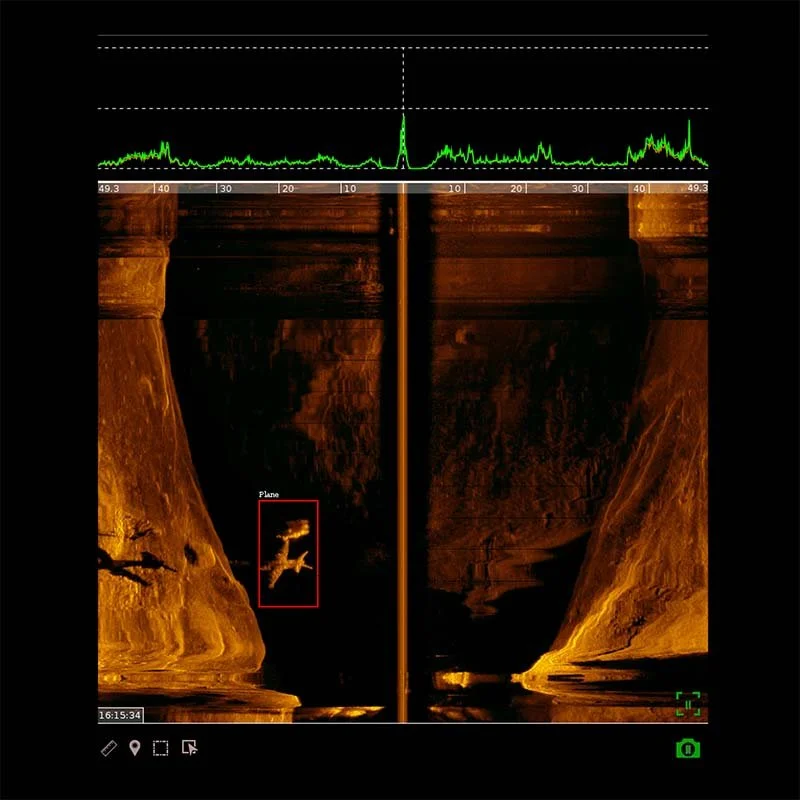
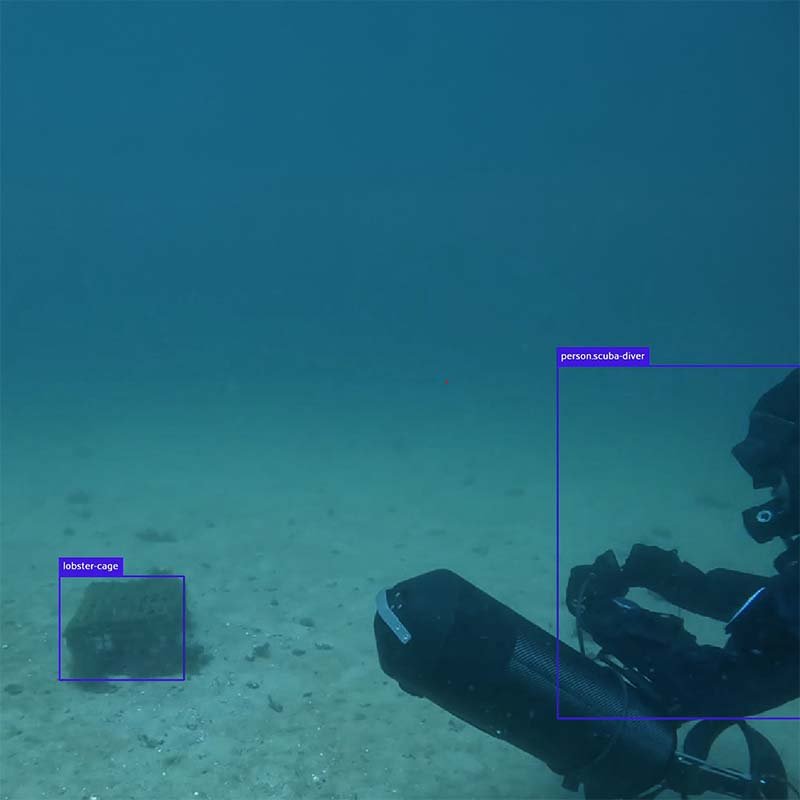
Det AI-baserade systemet för objektigenkänning (OR) är en tilläggsmodul som körs direkt ombord på det autonoma fordonet och analyserar rådata från sonar videokameran. Objekt av intresse identifieras och markeras visuellt i operatörens styrprogramvara – allt i realtid under uppdraget.
Ett molnbaserat ekosystem stöder operationssalsystemet genom regelbundna uppdateringar och nya klasser av objekt som kan identifieras. För att säkerställa att igenkänningsfunktionerna anpassas efter de föränderliga operativa behoven välkomnar molntjänsten bidrag från användarna, vilket möjliggör uppladdning av datamängder och förfrågningar om att träna systemet att känna igen objekt som förekommer i skanningarna.
Att ta itu med utmaningen
Att identifiera objekt på sonar från sidoskannande sonar kräver vanligtvis omfattande utbildning och erfarenhet, eftersom operatörerna måste upptäcka och tolka subtila detaljer i konturer och skuggor. Ofta måste man göra flera passager för att samla in data från olika vinklar. Därför kan en undersökning vara mycket tidskrävande och tröttsam för operatören, som ofta arbetar under press, utomhus och i dåligt väder.
För att möta utmaningarna med att lokalisera och identifiera undervattensföremål har EvoLogics utvecklat ett system för automatisk objektigenkänning i data som samlas in av våra autonoma fordon.
Vår AI-baserade lösning använder algoritmer för neurala nätverk som är utformade för att bearbeta data sonar sidoskannande sonar video, hantera stora datamängder i realtid och köras effektivt på dedikerad inbyggd hårdvara – eftersom molntjänster inte är tillgängliga på öppet vatten. Våra förtränade modeller täcker ett brett spektrum av objekt som är relevanta för viktiga kundgrupper. Systemet är klart att användas direkt och ytterligare träning finns tillgänglig för att utöka dess objektigenkänningsfunktioner.
Objektigenkänningssystemet har genomgått omfattande tester tillsammans med våra utvalda samarbetspartner och finns som tillval för alla EvoLogics kommersiella fordon – inklusive Sonobot 5 USV och Quadroin AUV.
Objektigenkänning – Viktiga funktioner
-
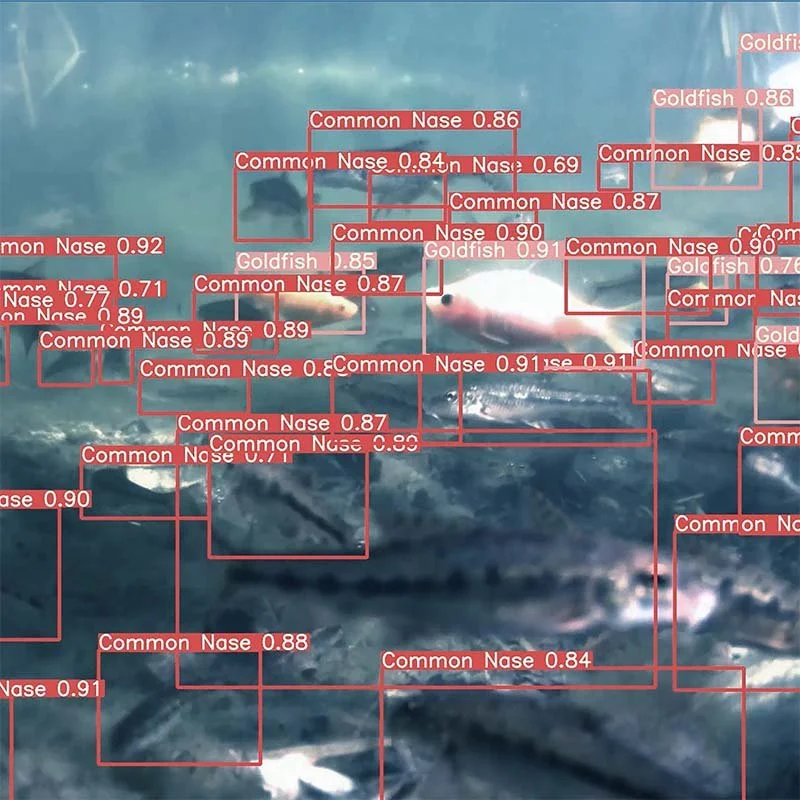
Objektigenkänning i realtid
Rådata från sonar videokamerorna analyseras direkt ombord på fordonet
Optimerad prestanda – identifierar objekt på mindre än en sekund
Avancerade algoritmer för neurala nätverk bearbetar stora mängder sonar videodata på specialiserad inbyggd hårdvara
-
Utökning av utbudet av objektklasser
Använd vårt befintliga objektbibliotek
Utnyttja en molnbaserad tjänsteplattform som regelbundet lägger till detekterbara objektklasser
Lägg till dina egna objekt – utför skanningar och skicka in dina data för AI-träning
-
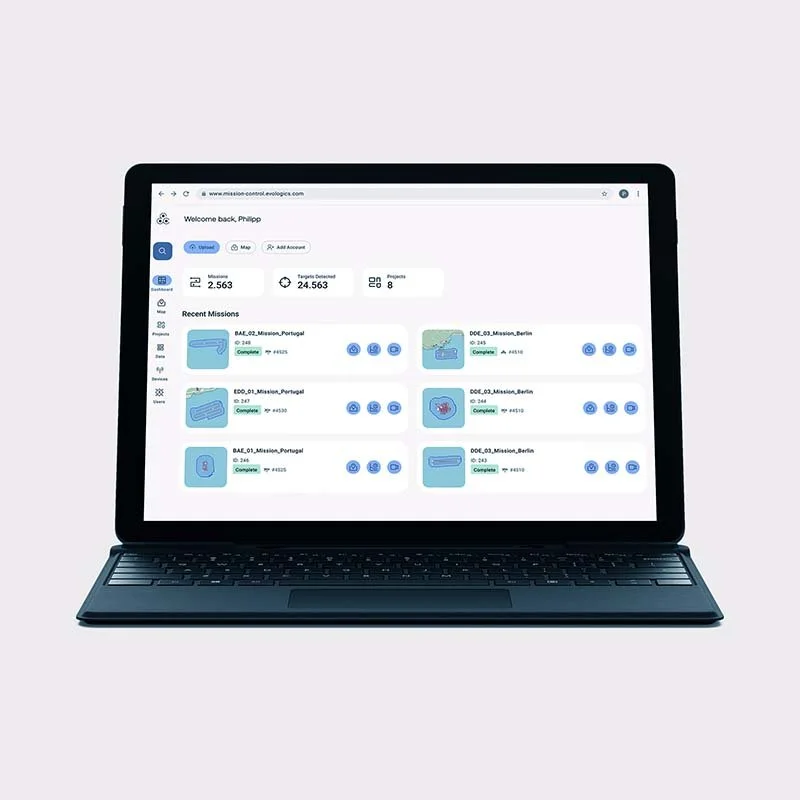
Molnbaserade tjänster
Regelbundna uppdateringar av den inbyggda programvarumodulen
Skapa nya objektklasser genom att skicka in dina skanningar för analys och AI-träning
Välj att dela dina objektklasser inom OR Cloud-ekosystemet eller begränsa dem till privat bruk
Datasäkerhet av militär standard garanterar fullständigt skydd för alla uppladdade datamängder
-
Integration av sidoskannande sonar videoflöde
Fungerar smidigt tillsammans med rådata sonar och videoflöden från kameror ombord.
Samma hårdvaru- och mjukvarumoduler hanterar båda datatyperna på ett effektivt sätt.
-
Kompatibel med alla EvoLogics-fordon
Sonobot 5 USV – obemannade autonoma farkoster
Quadroin AUV, Poggy AUV
Finns som en uppgradering av hårdvara och mjukvara för befintliga Sonobot-USV:er
-

Utökat utbud av objekt
Använd vårt befintliga objektbibliotek
Molnbaserad tjänst för att träna systemet att känna igen nya objekt
Lägg till dina egna objekt – utför skanningar och skicka dina data för AI-träning
System för undvikande av hinder
Att säkerställa säker navigering i föränderliga miljöer är avgörande för autonoma marina farkoster. Det AI-drivna systemet för undvikande av hinder gör det möjligt för våra USV:er och AUV:er att upptäcka och undvika hinder i realtid, vilket upprätthåller uppdragseffektiviteten samtidigt som riskerna minimeras.
System för undvikande av hinder – Viktiga funktioner
Beroende på fordonets konfiguration sammanställer systemet data från en sonar riktad framåt, en stereokamera ovanför vattenytan och en LiDAR-sensor för att kontinuerligt övervaka omgivningen och utlösa automatiska manövrer som förhindrar kollisioner.
Systemet bygger på avancerade algoritmer för neurala nätverk och bearbetar sensordata direkt i fordonet, vilket resulterar i praktiska navigationsbeslut som skyddar både fordonet och driftsmiljön.
-
Övervakar kontinuerligt fordonets omgivning med hjälp av framåtriktad sonar, stereokamera och LiDAR-data – beroende på fordonets konfiguration.
Avancerade algoritmer för neurala nätverk bearbetar stora mängder sensordata på specialiserad inbyggd hårdvara för att identifiera potentiella hinder under eller ovanför ytan.
-
Inbyggda neurala nätverk analyserar sensordata ombord på fordonet i realtid.
Genererar praktiska justeringar av navigeringen för att undvika hinder samtidigt som uppdragets kurs bibehålls.
-
Fungerar direkt med Sonobot 5 USV och våra AUV:er, och använder samma AI-ramverk för både yt- och undervattensplattformar.
Beroende på fordonets konfiguration sammanställer systemet data från framåtriktad sonar, en stereokamera (USV) och LiDAR (USV) till en samlad hinderkarta för precis navigering och automatiska undanmanövrer.
Fullt kompatibel med fordonets autopilot- och uppdragskontrollsystem, vilket garanterar effektiv drift utan att operatören behöver ingripa.
-
Framåtriktat sonar detektering av undervattenshinder – tillgängligt för Sonobot 5 USV och AUV.
Stereokamera och/eller LiDAR för djupuppfattning och hinderavkänning ovanför vattenytan – tillgängligt för Sonobot 5 USV.
