
Quadroin AUV
Quadroin – ett autonomt undervattensfarkost (AUV)
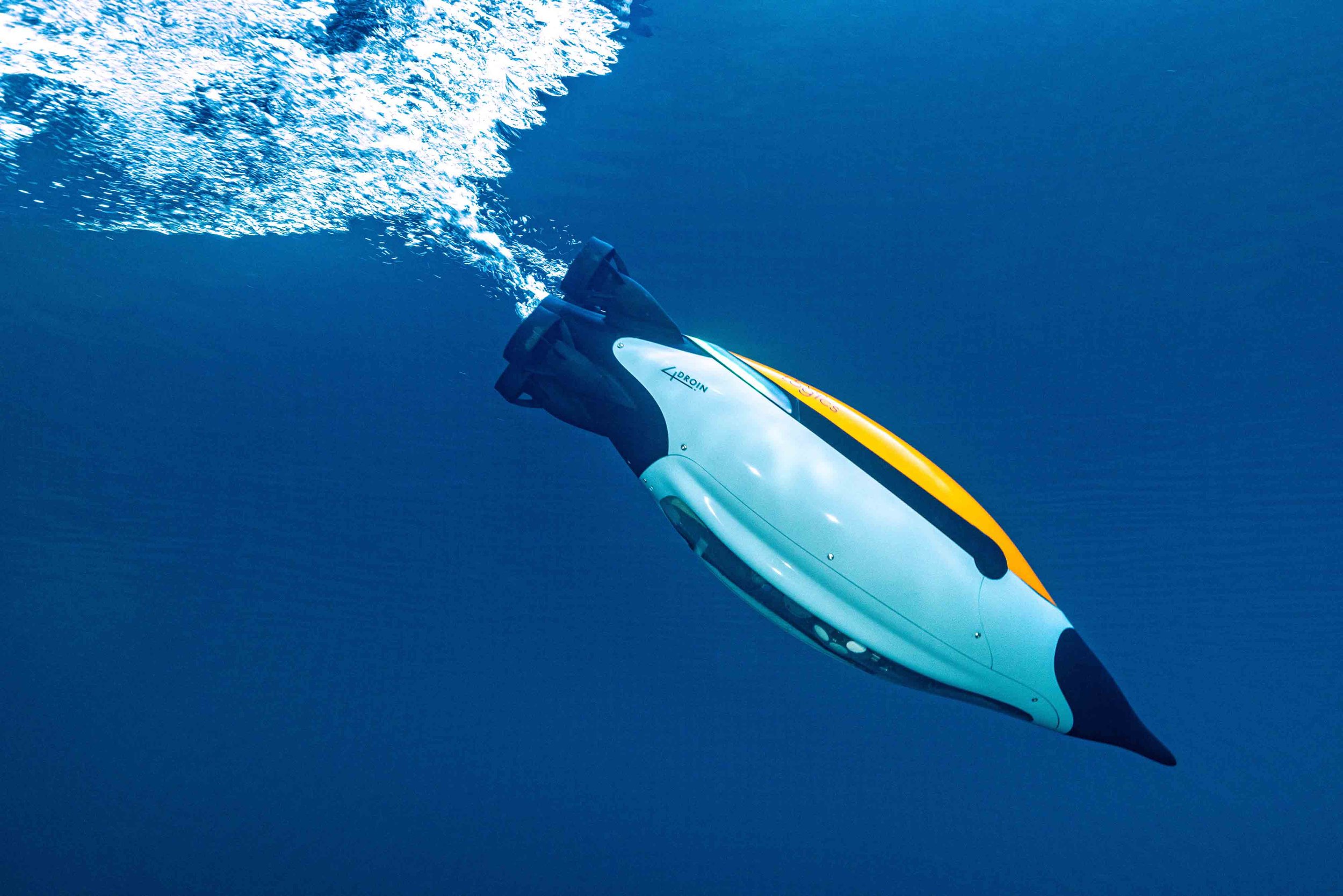
EvoLogics Quadroin är ett autonomt undervattensfarkost (AUV) som är konstruerat för undersökningar med högupplöst sidoseende sonar kamera.
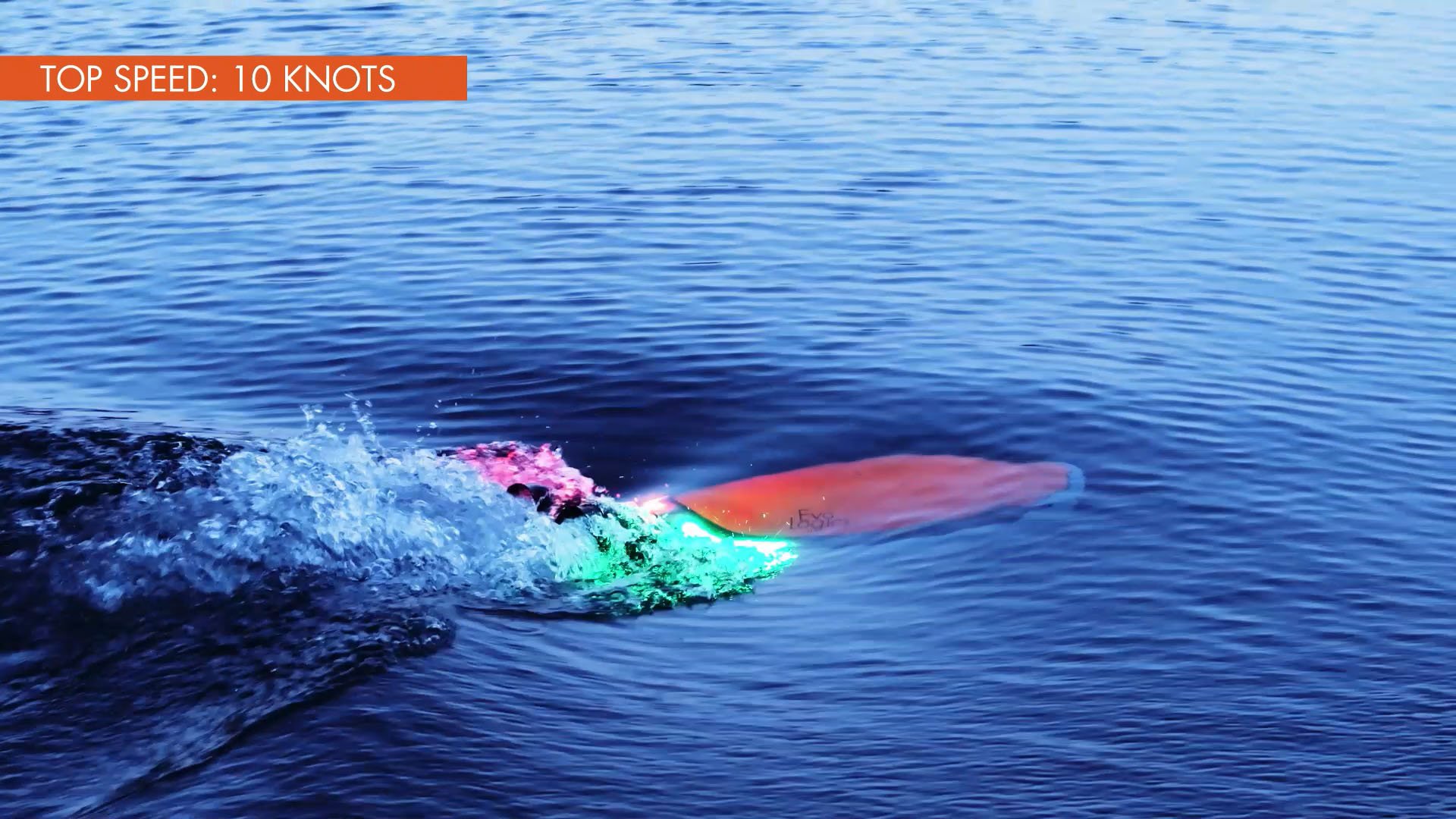
Dess bioniska, pingvininspirerade skrov kombinerar hydrodynamisk effektivitet med hög manövrerbarhet, vilket möjliggör hastigheter på upp till 10 knop samtidigt som energiförbrukningen hålls låg för långvariga undervattensoperationer.
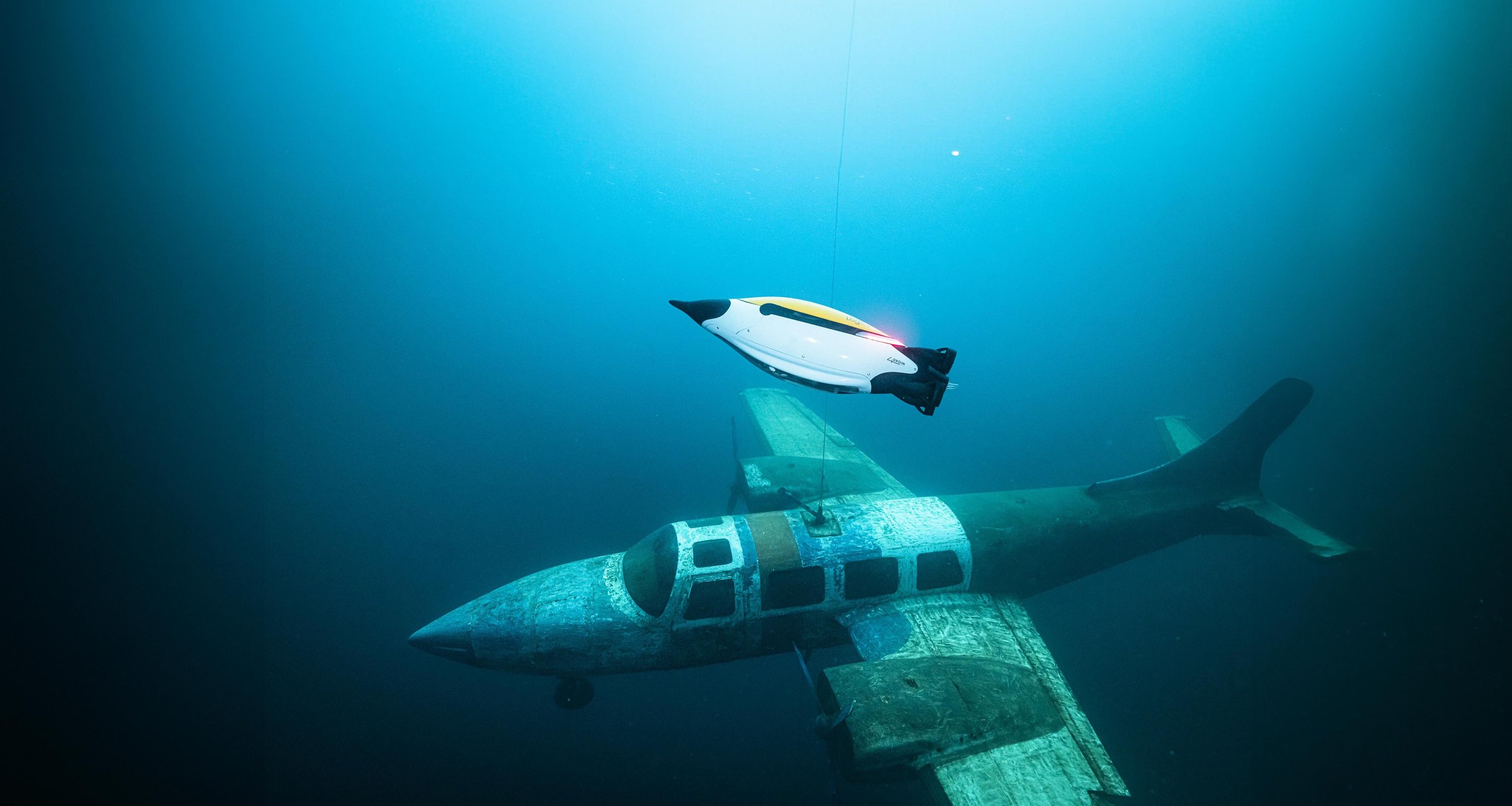
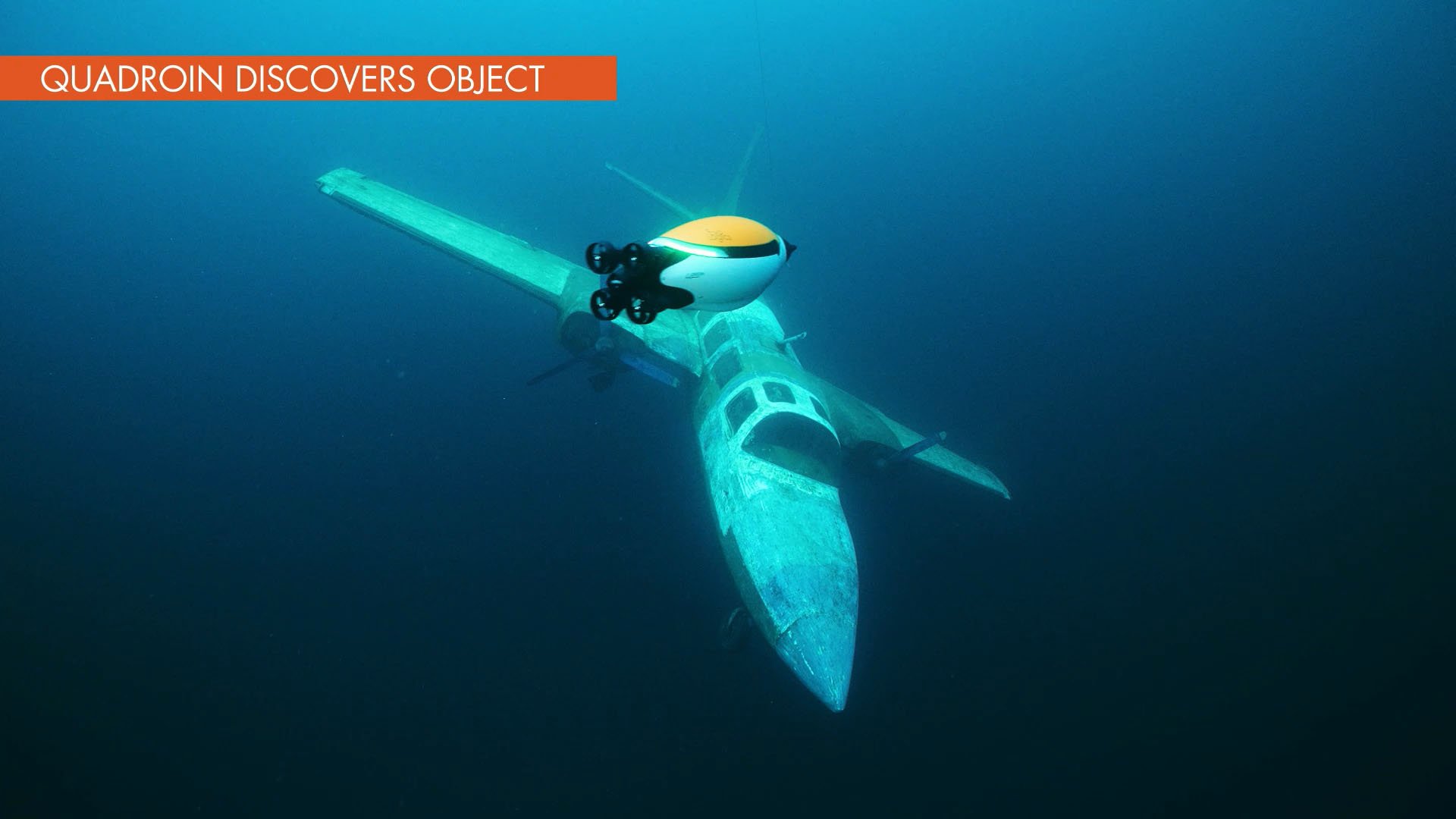
Quadroin utför självständigt förprogrammerade uppdrag och samlar in data längs sitt rutnät av waypoints. Den är utrustad med ett sidoskannande sonar, en nedåtriktad Full HD-kamera och en AI-baserad modul för objektigenkänning för detaljerad visuell dokumentation och detektering av föremål under vattenytan.
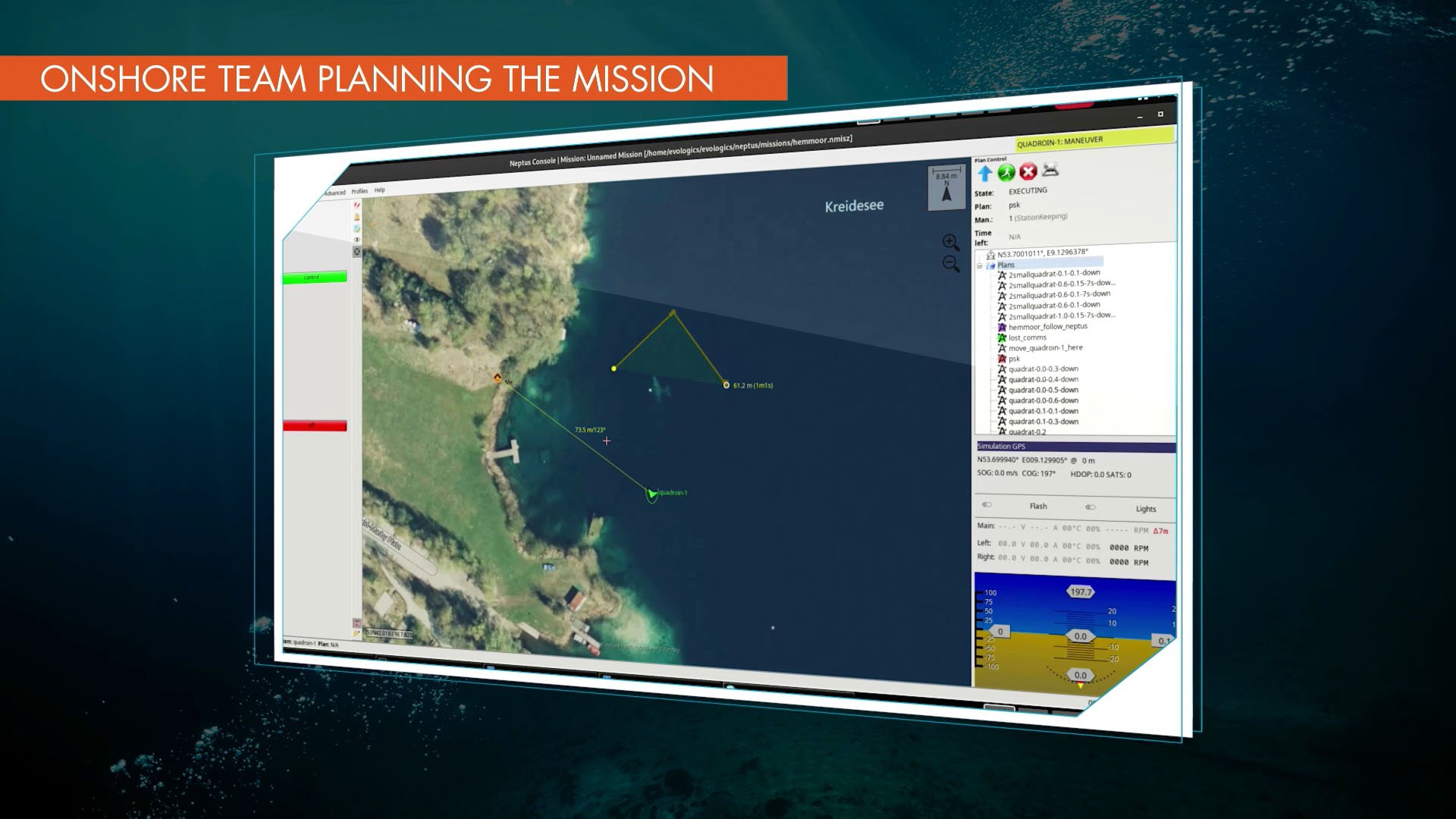
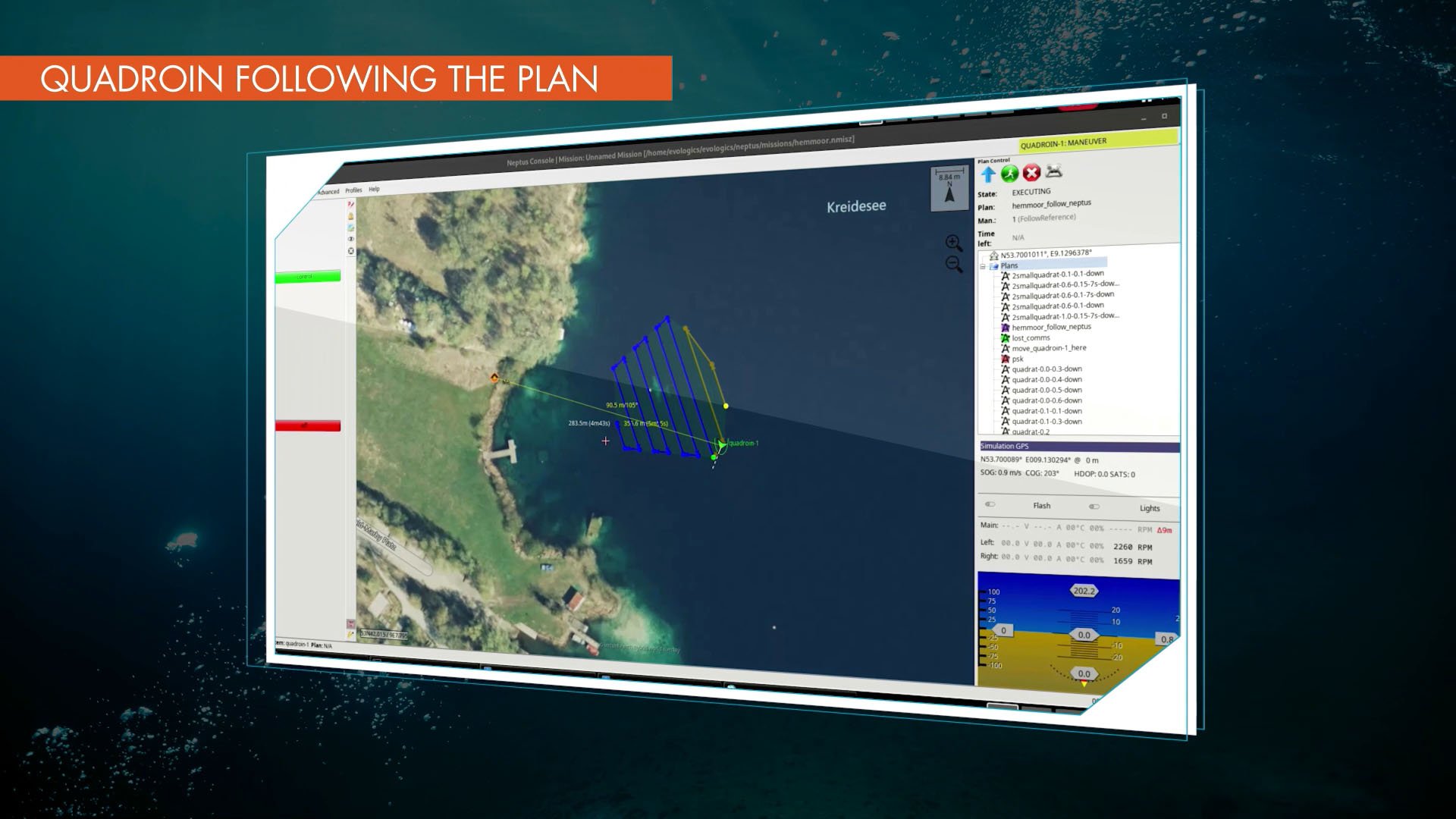
Ett nätverk av ytstationer möjliggör precis navigering och fullständig överblick över uppdraget – med realtidsuppdateringar om färdväg och status som trådlöst skickas till operatören på land.
Quadroin är kompakt och lättanvänd, effektiviserar driften, minskar driftsättningstiden och erbjuder en professionell plattform för datainsamling under vatten – lika effektiv som fristående verktyg som som del av ett samordnat nätverk med flera farkoster.
Huvudsakliga funktioner – Quadroin AUV

Högprecisionskartläggning. Quadroin är utrustad med ett sidoskannande sonar en nedåtriktad Full HD-kamera, i kombination med AI-baserad objektigenkänning för detaljerad undervattensavbildning och detektering av objekt i sidoskannings- och videoflöden. För att samla in data kör fordonet ett övervakat kartläggningsläge längs ett förprogrammerat rutnät som täcker det område som ska kartläggas.

Uppdragsöverblick och styrning. Farkosten förblir uppkopplad – både ovan och under ytan – vilket ger operatörerna fullständig överblick och kontroll under uppdragets alla faser. Innan dykningen tar farkostens hopfällbara multiantenn emot GNSS-positioner och upprättar trådlösa förbindelser till kontrollstationen. Uppdraget genomförs som en kontinuerlig dataström via en satellitanslutning eller ett USV- eller USBL-utrustat fartyg – vilket ger GNSS-lås med akustiska positionsbestämningar och vidarebefordrar fordonets status till land. Via den akustiska länken kan operatörerna justera waypoints, ladda upp modifierade uppdragsparametrar, avbryta eller avbryta uppdraget och initiera automatiserade återhämtningsprocedurer. Efter uppstigning är alla insamlade data tillgängliga för trådlös nedladdning och analys efter uppdraget.

Avancerad navigering med statusuppdateringar i realtid. Fordonet är utrustat med ett akustiskt modem och kombinerar tröghetsnavigering med periodiska positionsbestämningar via USBL/LBL för att regelbundet få GNSS-signal från ytbaserade gateway-enheter. Under uppdraget kan operatören via en trådlös länk till gateway-enheten få tillgång till uppdateringar om färdväg och status.
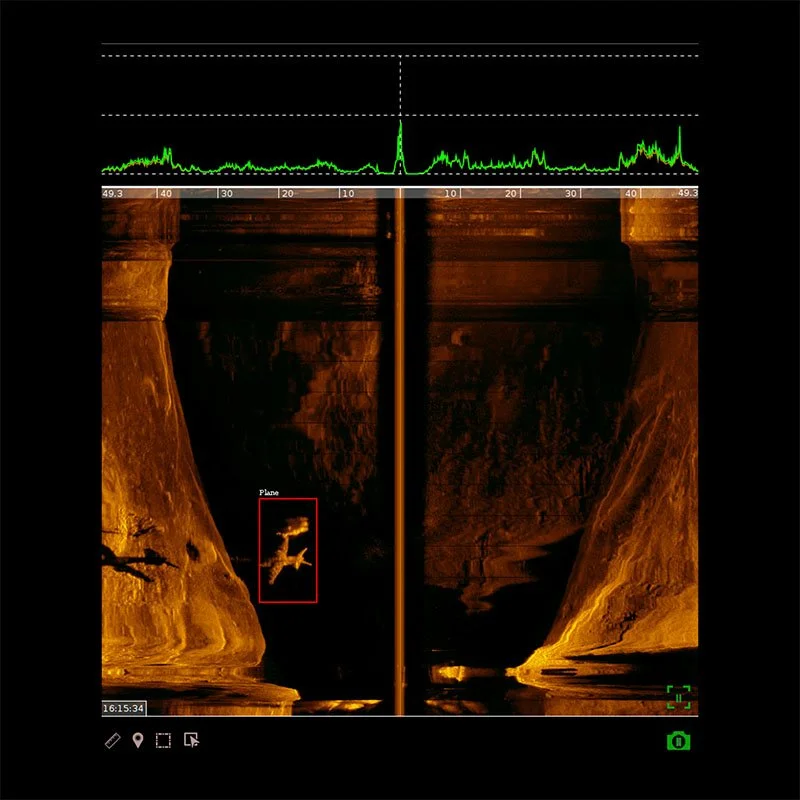
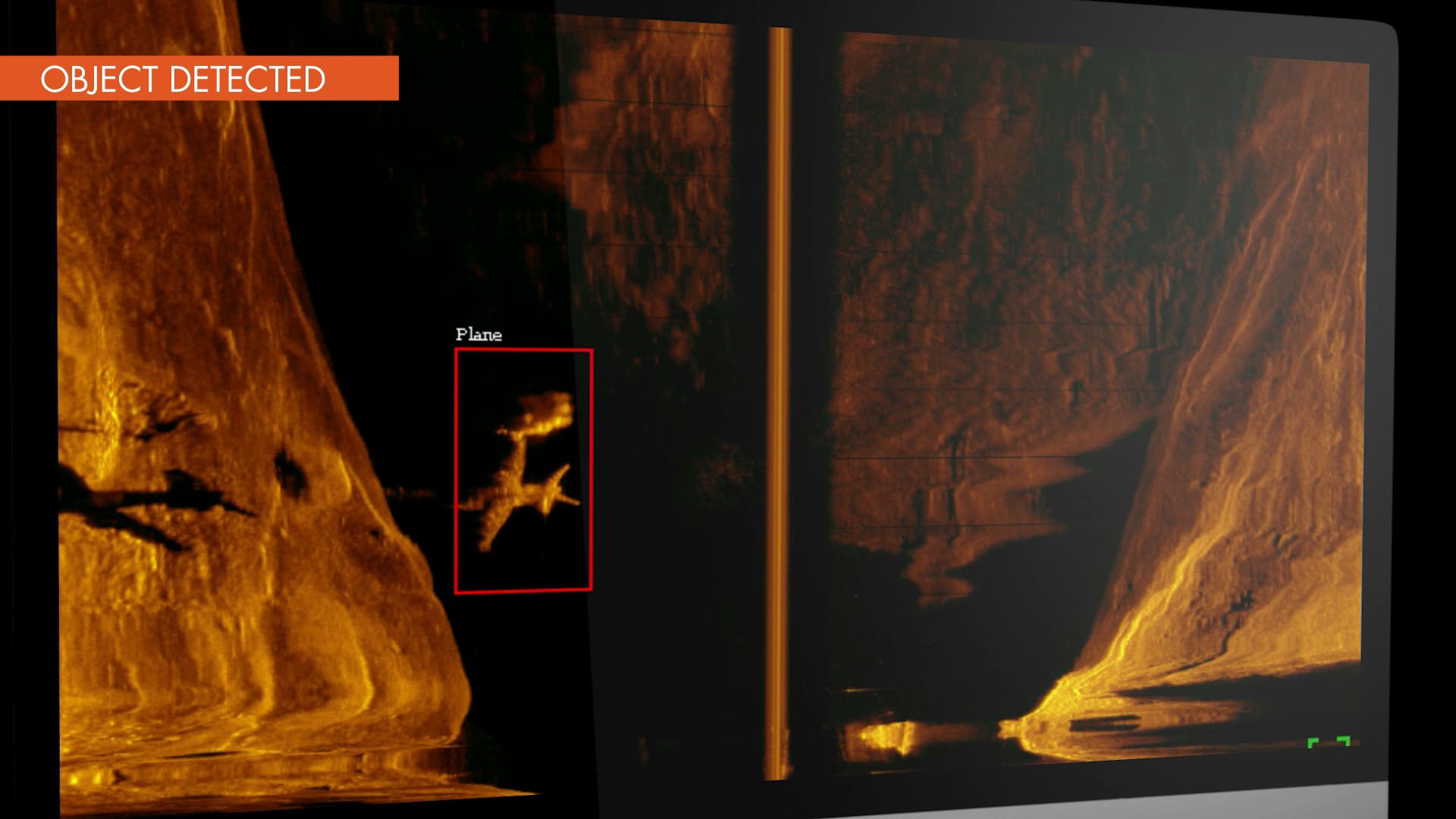
AI-driven bearbetning ombord Systemet körs direkt i fordonet och analyserar data från sidoskannande sonar videokameror för att i realtid identifiera olika objektkategorier under uppdraget. Via den akustiska länken överförs information om typ och position för varje detektering till kontrollstationen för omedelbar utvärdering, samtidigt som alla detekteringar sparas i den fullständiga datamängden för detaljerad analys efter uppdraget.
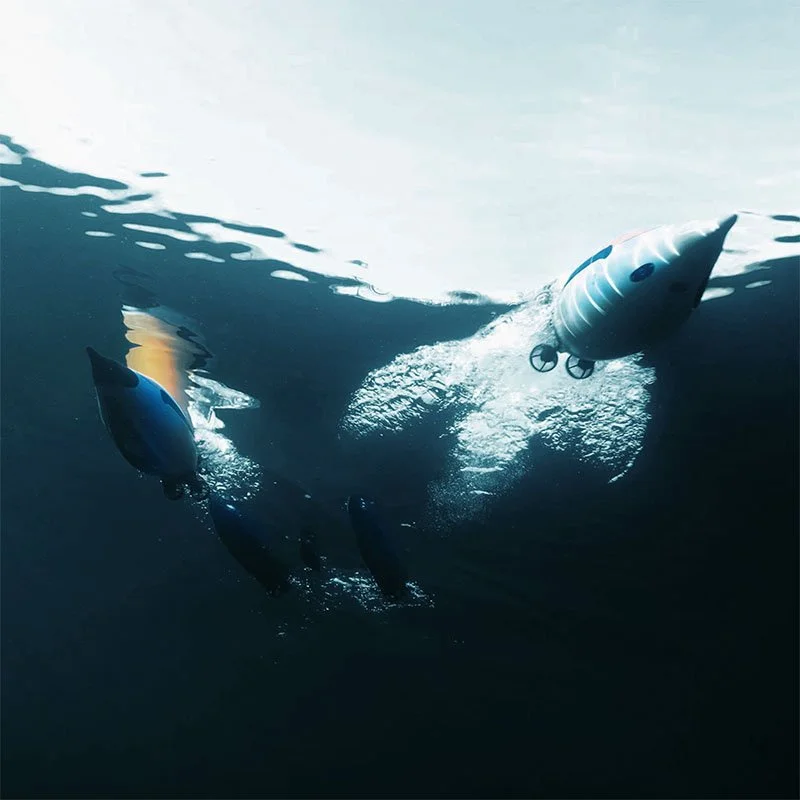
Samverkande nätverk med flera farkoster. Quadron kan konfigureras för att fungera som en del av samordnade uppdrag med flera fordon. Quadrons AUV:er, Sonobots USV:er och EvoLogics dykarnavigeringssystem kopplas samman med ytstationer till en hybridstyrka bestående av robotar och dykare. Med Quadrons uppdateringar om upptäckta objekt kan dykare dirigeras till fynden för bedömning på plats, vilket möjliggör effektiva och tidsbesparande inspektioner.
Hög hastighet och effektiv drift. Quadrons spindelformade skrov, inspirerat av pingviner, minimerar motståndet och maximerar effektiviteten. Farkosten når hastigheter på upp till 10 knop samtidigt som den bibehåller enastående manövrerbarhet och låg energiförbrukning, vilket gör den självstyrande undervattensfarkosten (AUV) lämplig för både kartläggningsuppdrag och dataintensiva insatser.

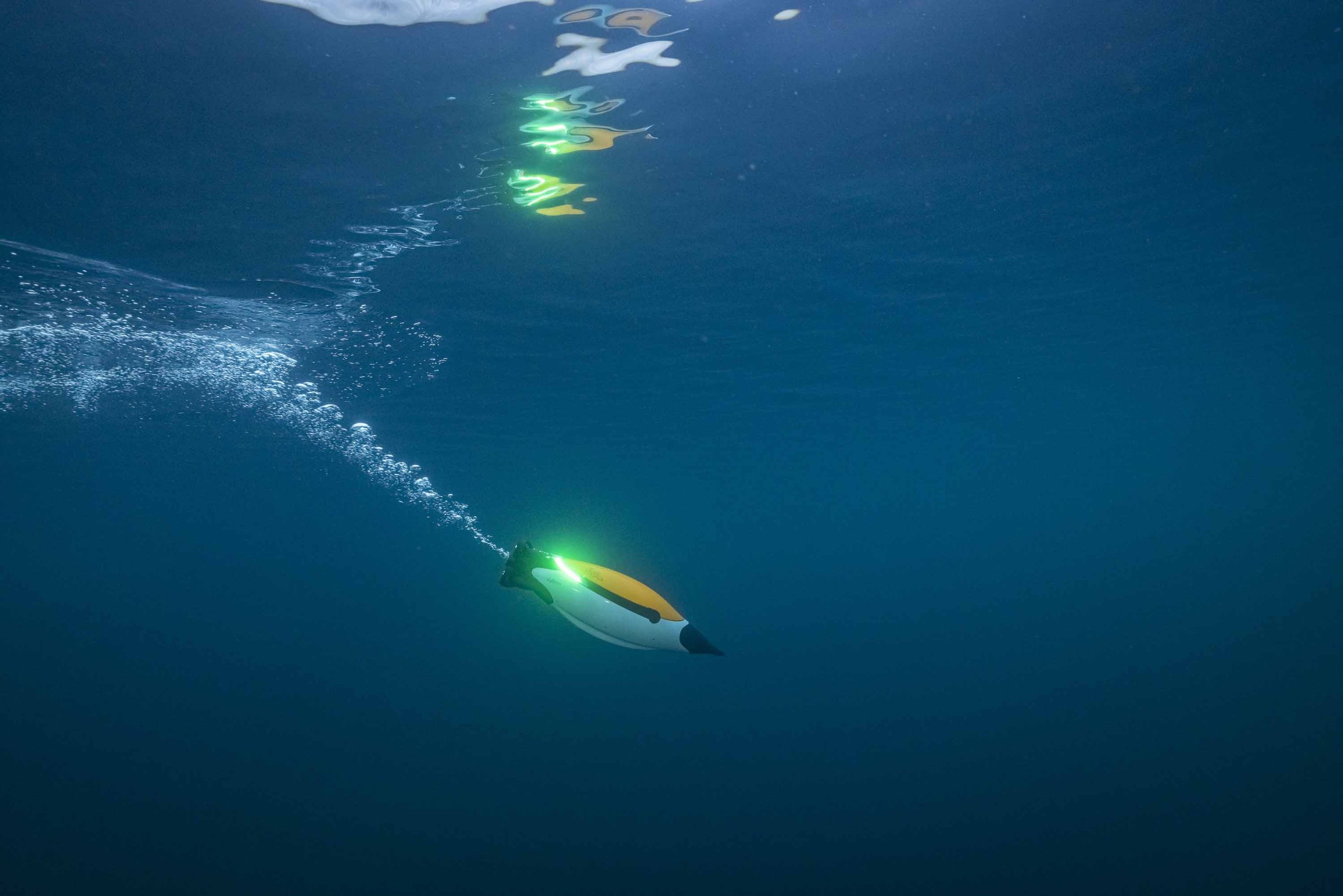
Enkel att hantera, lätt att hitta. Quadron är lätt och kompakt och kan bäras av en enda person, transporteras i ett bagageutrymme och snabbt sjösättas ute på fältet – från fartyg eller plattformar av alla storlekar. Före eller efter uppdraget kan farkosten styras manuellt med en fjärrkontroll för att nå start- eller upphämtningsplatsen. När den åter kommer upp till ytan syns undervattensfarkosten tydligt över vattnet tack vare starka lysdioder och blinkande lampor, vilket gör det enkelt att hämta upp den.

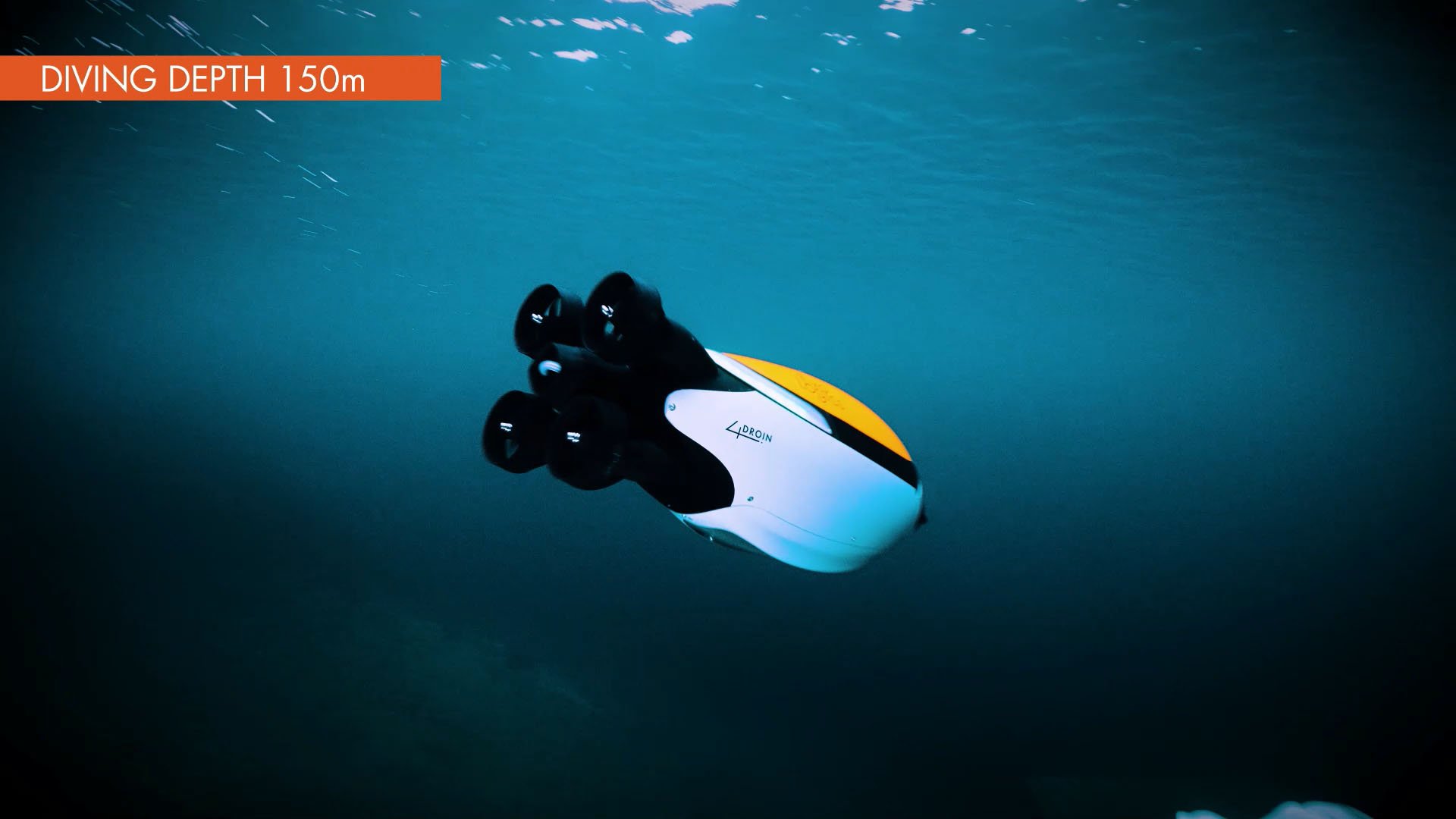
Djupkapacitet 150 m. Hastighet upp till 10 knop
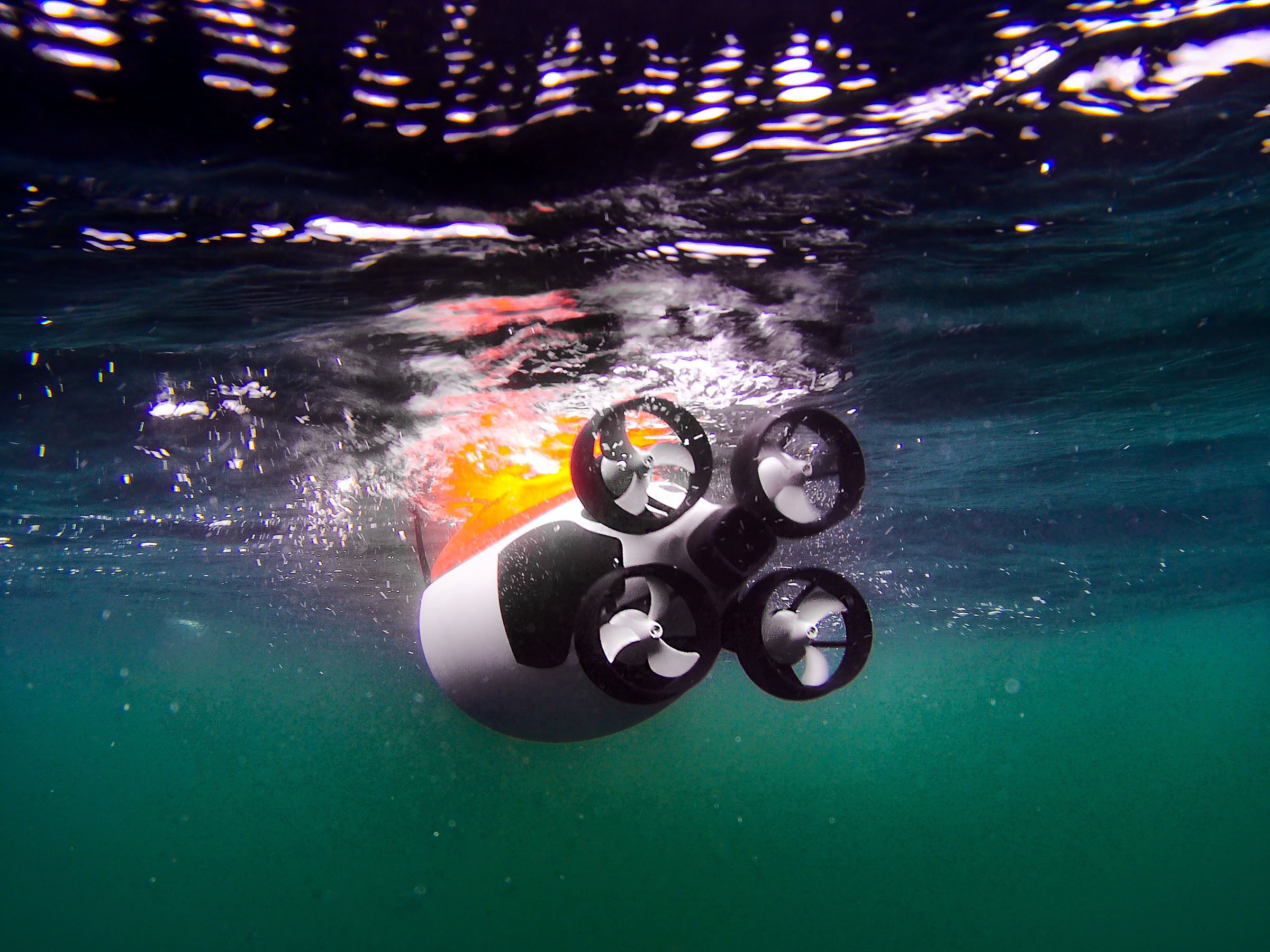
Fyra kraftfulla propellrar, maxhastighet 10 knop

Quadroin är kompakt och lättanvänd, effektiviserar arbetet, minskar installationstiden och erbjuder en professionell plattform för datainsamling under vatten.

Fordonets nyttolast Quadroin-plattformen är utrustad med en integrerad nyttolast som omfattar sonar bildsystem, akustiska enheter och radiokommunikationsutrustning, GNSS-antenner samt inbyggd AI för att upptäcka undervattensobjekt och säkerställa en effektiv, kollisionsfri och autonom drift.
Fordonets nyttolast
Quadroin-plattformen är utrustad med en integrerad nyttolast som omfattar sonar bildsystem, akustiska och radiokommunikationsenheter, GNSS-antenn samt inbyggd AI för att upptäcka undervattensobjekt och säkerställa en effektiv, kollisionsfri autonom drift.
-
Sidoskannande Sonar
Skapar detaljerade bilder av havsbotten och undervattensinfrastrukturen.Framåtriktad Sonar
Stöder det inbyggda systemet för kollisionsundvikande för säker navigering.
-
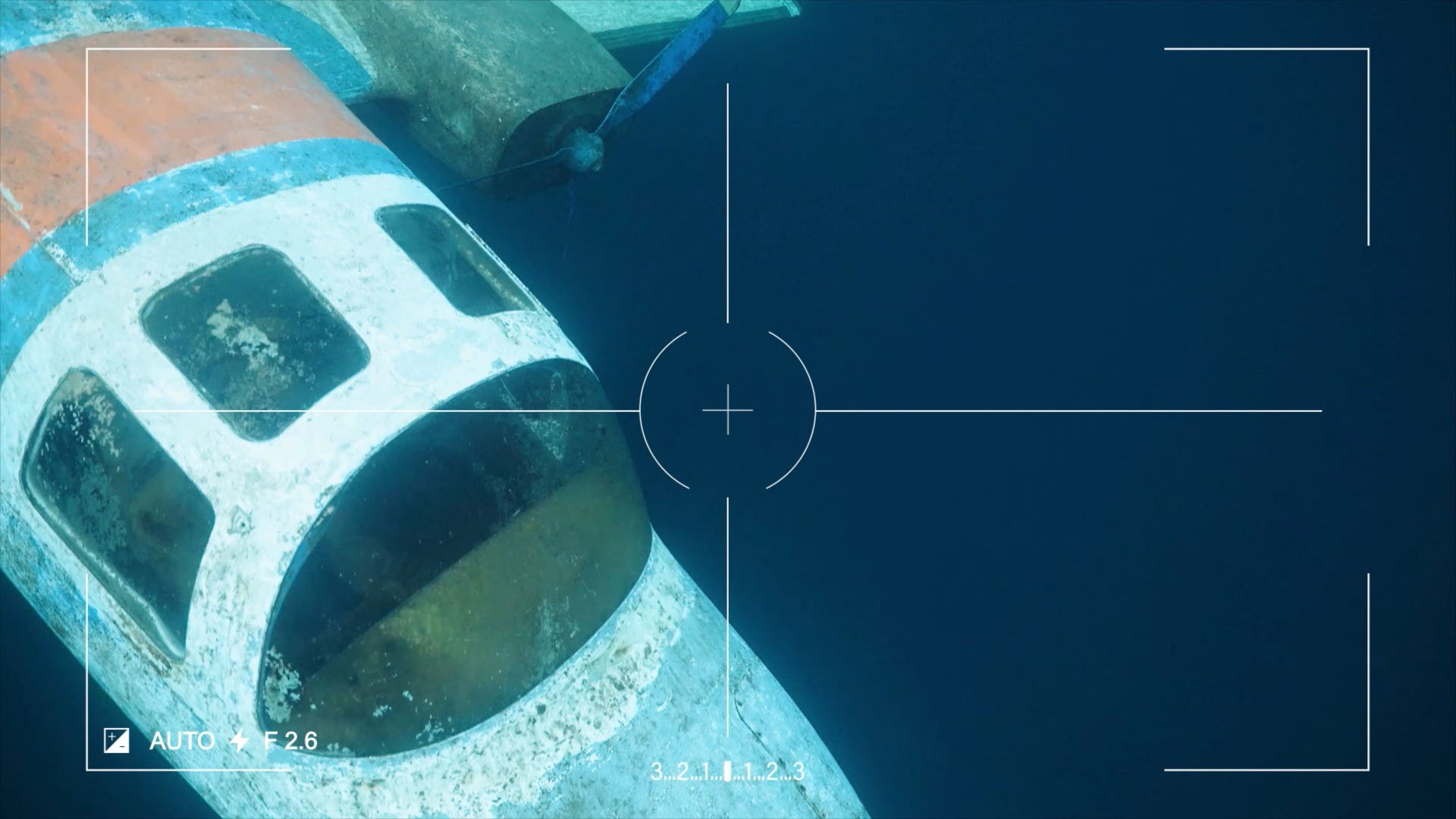
Undervattenskamera med Full HD-upplösning
Möjliggör visuell dokumentation av havsbotten och undervattensanläggningar.
-
Objektigenkänningsmodul
Körs direkt ombord på fordonet och analyserar sonar videoflöden för att upptäcka och markera objekt vid granskningen efter uppdraget.System för undvikande av hinder
Använder sonar och AI-bearbetning för att förhindra kollisioner under autonoma uppdrag.
-
Tillval: ADCP (
) – akustisk Doppler-strömprofilerareCTD-sensorer (ledningsförmåga, temperatur och djup)
kan utöka fordonets möjligheter till miljöövervakning
-
GNSS-positionerings
En inbyggd GNSS-mottagare ger positionsbestämning vid ytan med hjälp av en utfällbar multiantenn som automatiskt fälls in inför dykningen.Tröghetsnavigerings
En sensor i ett enda modul kombinerar DVL och AHRS/INS för navigering under vatten med hjälp av kursberäkning, kompletterad med regelbundna GNSS-positioner från det akustiska positioneringssystemet USBL/LBL.
-
Det undervattensakustiska modemet
kopplar samman farkosten med ytstationen under uppdraget, vilket möjliggör statusuppdateringar och akustisk positionering som förbättrar tröghetsnavigeringen med hjälp av GNSS-korrigeringar.
-
Den utfällbara multiantennan för GNSS-positionering och trådlös kommunikation dras automatiskt in före dykningen och ligger i jämnhöjd med fordonets kaross, vilket säkerställer en strömlinjeformad hydrodynamisk profil under hela uppdraget.
WiFi- eller långdistansradio
: En WiFi- eller långdistansradio-accesspunkt kopplar samman fordonet med landstationen, vilket möjliggör konfiguration av fordonet, uppladdning av uppdrag och nedladdning av data efter återhämtning.LTE-
Ett valfritt LTE-tillägg utökar kommunikationsräckvidden bortom siktlinjen, vilket ger ökad operativ flexibilitet.
-
Quadroins styrprogramvara stöder hela uppdragets förlopp: interaktiv, georefererad planering av mätnätet; övervakning och styrning av uppdraget under genomförandet; samt nedladdning av hela datamängden efter uppdraget för detaljerad analys och export i flera format.

Alternativ för Surface Gateway
Gatewayen fungerar som en central ytnod som möjliggör akustisk positionering och kommunikation med Quadroin under hela uppdraget. Den utbyter akustiska signaler med fordonet, beräknar dess georefererade positionsbestämningar och sänder tillbaka dem för att förbättra Quadroins tröghetsnavigering med periodiska GNSS-korrigeringar. Via WiFi eller långdistansradiolänkar vidarebefordrar gatewayen positionsdata och statusuppdateringar från Quadroin till kontrollstationen – vilket säkerställer en kontinuerlig överblick över uppdraget.
Beroende på operativa behov kan gatewayen användas som en stationär eller mobil ytnod – eller som ett hybridnätverk för att täcka omfattande undersökningsområden.
-
EvoLogics USBL-boj är en kompakt, fristående enhet med USBL-sändare/mottagare, dubbla GNSS-mottagare, inbyggd dator, trådlös åtkomstpunkt och uppladdningsbart batteri. Den är utformad för tillförlitlig USBL-positionering och akustisk kommunikation samt förkalibrerad för snabb och enkel installation. Bojen fungerar som en stationär ytnod för Quadroin och utbyter akustiska signaler med farkosten inom sin räckvidd.
-
EvoLogics Sonobot 5, ett obemannat ytfartyg utrustat med en USBL-arm, är ett mobilt alternativ till den stationära bojen. Precis som bojen har den en USBL-antenn, GNSS och en trådlös åtkomstpunkt som kopplar den till kontrollstationen. USV:n fungerar som en ytnod och kan aktivt följa Quadroin, samtidigt som den håller sig inom det optimala akustiska avståndet för positionering och kommunikation. Med rörligheten hos en autonom ytdrönare säkerställer Sonobot kontinuerlig täckning och utökar den operativa flexibiliteten för Quadroin-uppdrag.
-
Ett fartyg utrustat med ett akustiskt positioneringssystem av typen EvoLogics USBL kan fungera som den primära ytbasen för Quadroin-uppdrag, där det används som start- och återhämtningsplattform, akustisk gateway och kontrollcenter
-
Vid komplexa, storskaliga uppdrag kan stationära och mobila noder kombineras till ett hybridnätverk av ytgateways för att uppnå täckning över stora områden och förbättra den akustiska positioneringsnoggrannheten. Genom att integrera stationära bojar och mobila sonobotar kan systemet konfigureras som en LBL-matris eller en hybridlösning av USBL/LBL, anpassad efter specifika uppdragskrav. Denna flexibla arkitektur förbättrar den akustiska geometrin, optimerar noggrannheten i navigationsstödet och säkerställer kontinuerlig kommunikation med Quadroin över vidsträckta områden.
Användningsområden – Quadroin AUV

Inspektion av kritisk infrastruktur. Undersökning av hamnar, rörledningar, kablar och offshoreanläggningar genom återkommande patrulleringar för att upptäcka förändringar i konstruktionens skick eller i den omgivande miljön.
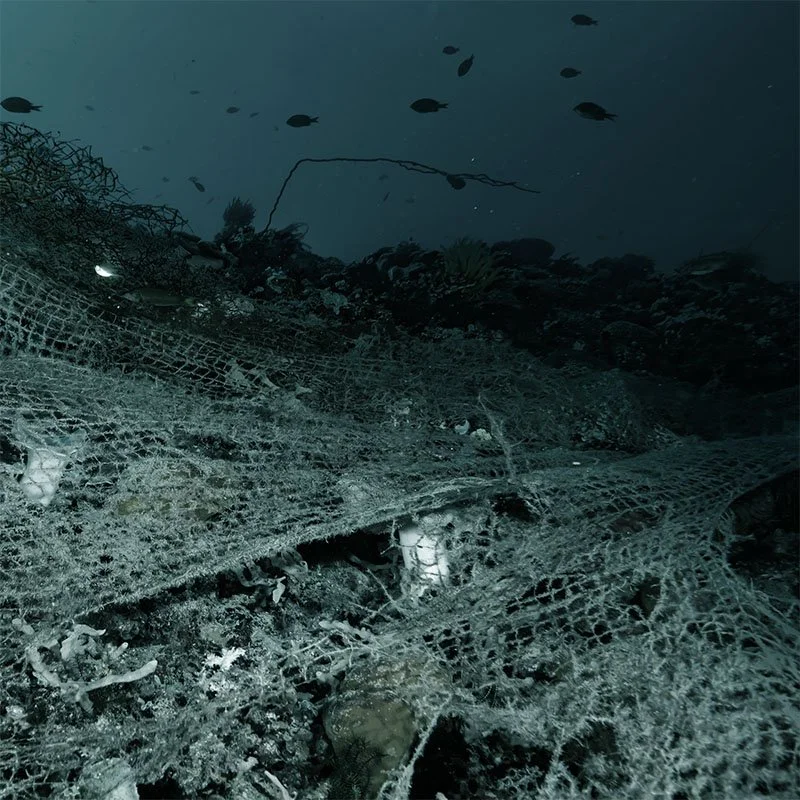
Miljöövervakning och vetenskaplig forskning. Insamling av miljödata, kartläggning av känsliga ekosystem och upptäckt av övergivna fiskeredskap för att stödja forskning och bevarandeinsatser.

Hydrografi. Kartläggning av havsbotten för sjöfart, hamnförvaltning, kustteknik och miljökonsekvensbedömningar.

Riskdetektering och säkerhetsinsatser. Identifiering av faror såsom minor och oexploderade stridsmedel, till stöd för både civila och militära säkerhetsändamål.
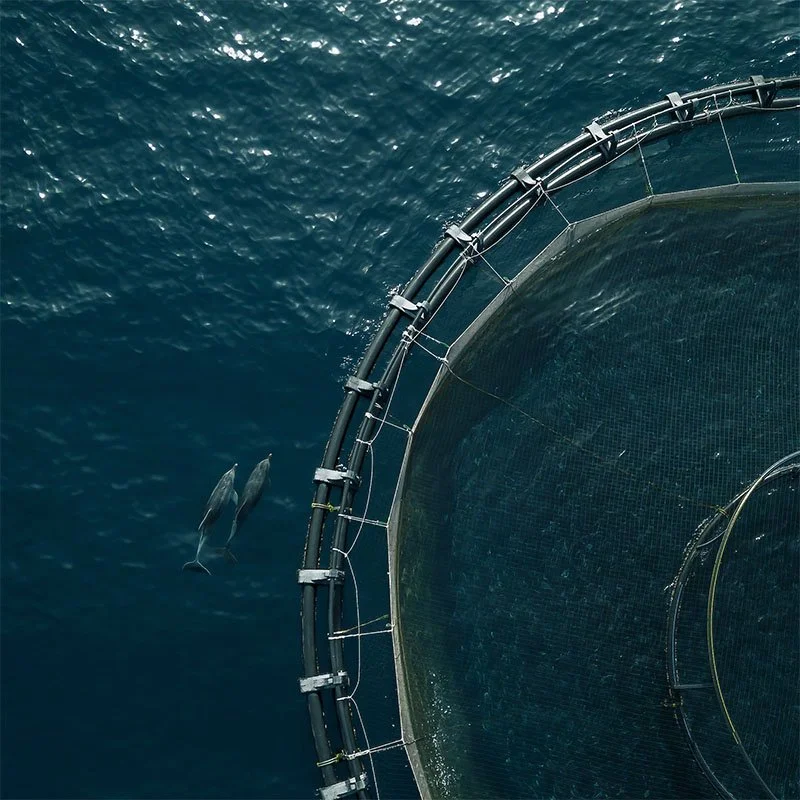
Verksamhet till havs. Övervakning av fiskodlingar, undervattensbyggnadsarbeten och muddringsarbeten för att främja underhåll, säkerhet och driftseffektivitet.

Sök- och räddningsinsatser samt katastrofhjälp. Insamling av sidskannings- och videodata med AI-baserad objektigenkänning för sök- och räddningsinsatser samt katastrofhjälp.
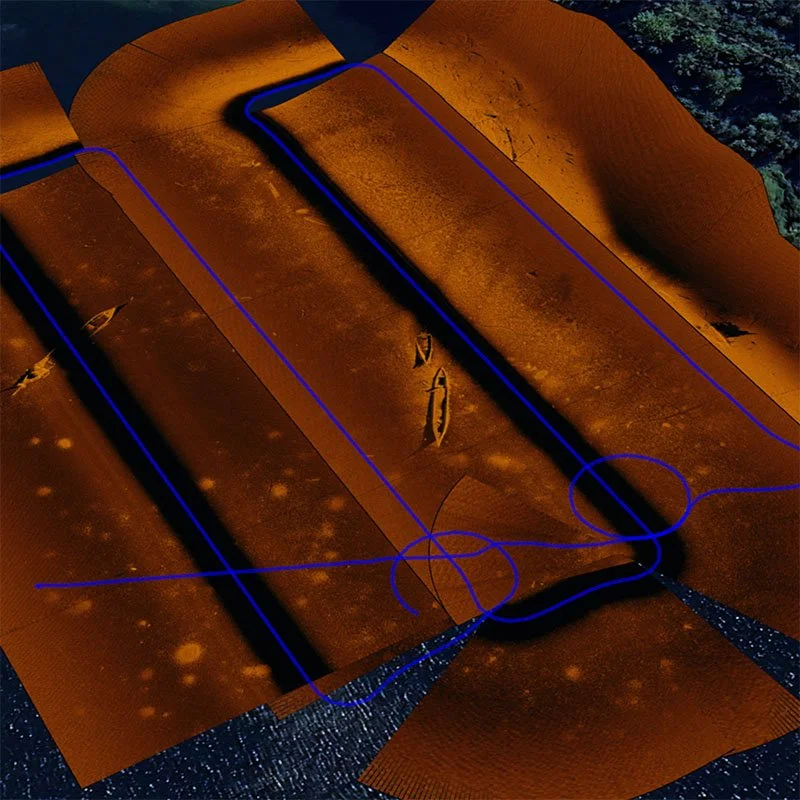
Marinarkeologi. Undersökning av vrak och arkeologiska fyndplatser till stöd för dokumentation, forskning och bevarandearbete.
Tekniska specifikationer – Quadroin AUV
-
Arbetsdjup
–150 mHastighet
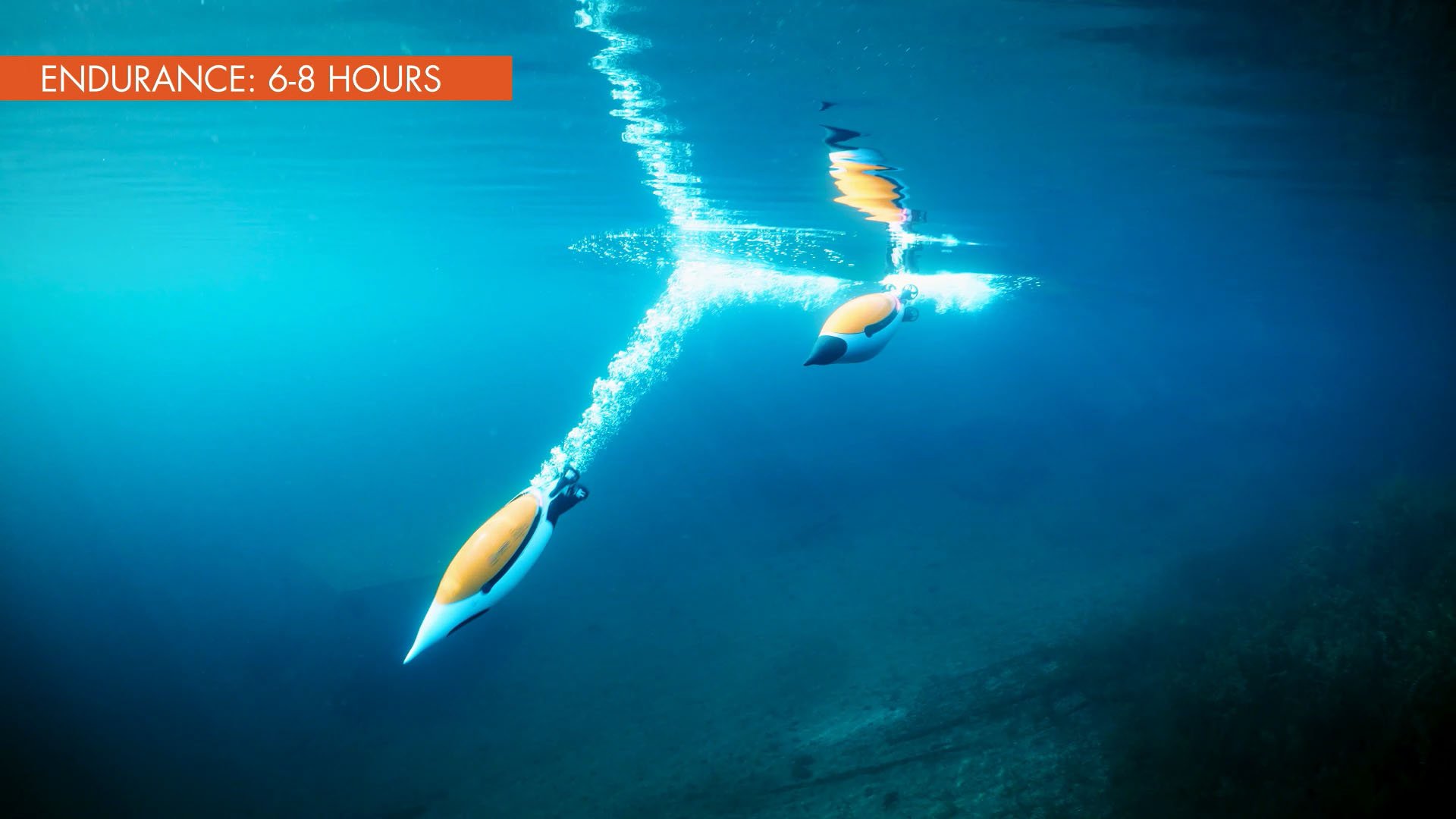
: Upp till 10 knopDriftstid
Upp till 12 timmar vid 1,5 m/s (standardmätningshastighet), beroende på nyttolast
-
Strömförsörjning
Inbyggda uppladdningsbara litiumjonbatterier,
kan bytas ut vid behovBatterikapacitet
: 1,3 kWhCharging Time
< 6 hours
-
UW Kommunikation & Positionering
MINI 18/34 akustiskt modem med atomur, upp till 13,9 kbit/sNavigering
-GNSS, Nortek Nucleus1000 DVL med AHRS och
INS, positionering med hjälp av USBL/LBL, kollisionsundvikande med framåtriktat enkelstråligt ekolodRadiokommunikation
, Wi-Fi 2,4 GHz, ISM-modem 863–870 MHz (915 MHz som tillval), StreamCaster 2x2 MN-MIMO 2200–2500 MHz, LTE som tillvalInbyggd dator
s AI-modul för avancerad inbyggd databehandling
-
Utrustningsalternativ
sonar, nedåtriktad Full HD-kamera med dimbara LED-lampor, hårdvara/mjukvara för objektigenkänning, ADCP, CTDLastkapacitet
: upp till 3 kgMått
, längd 1120 mm, max. diameter 320 mmWeight
< 25 kg in air / buoyancy trimmable
Quadroin AUV
Quadroin är kompakt och lättanvänd, effektiviserar driften, minskar driftsättningstiden och erbjuder en professionell plattform för datainsamling under vatten – lika effektiv som fristående verktyg som som del av ett samordnat nätverk med flera farkoster.















Objektkännedom -
Objektkännedom -
Objektigenkänning är en avancerad funktion för Sonobot USV och UUV:s.
Det AI-baserade systemet är en extra modul som körs direkt ombord på fordonet och analyserar rå sidoskanning sonar eller videokamerautgångar.
