
Quadroin utför förprogrammerade uppdrag på egen hand.
Högprecisionsmätning
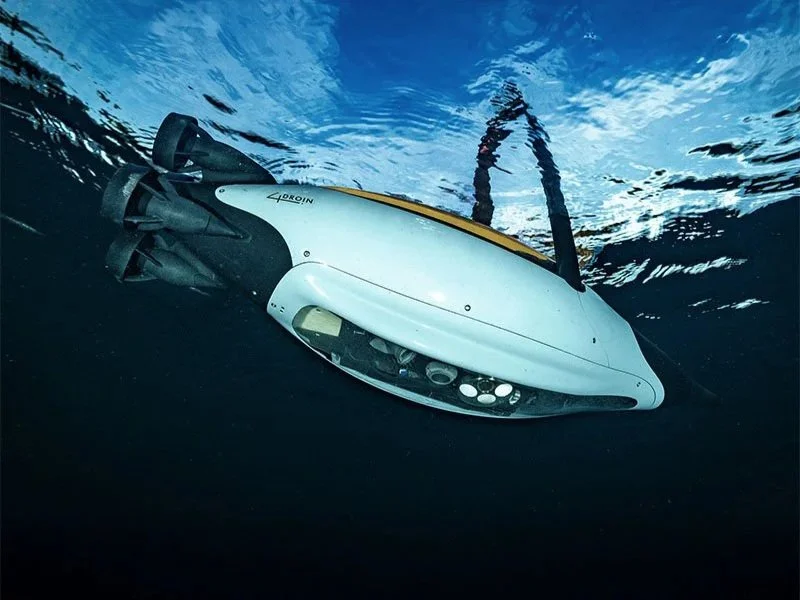
Quadroin är utrustad med ett sidoskannande sonar en nedåtriktad Full HD-kamera, i kombination med AI-baserad objektigenkänning för detaljerad undervattensavbildning och detektering av objekt i sidoskannings- och videoflöden. För att samla in data kör farkosten ett övervakat kartläggningsläge längs ett förprogrammerat rutnät som täcker det område som ska kartläggas.
Avancerad navigering med statusuppdateringar i realtid.
Fordonet är utrustat med ett akustiskt modem och kombinerar tröghetsnavigering med periodiska USBL/LBL-positionsbestämningar för regelbunden GNSS-anslutning via ytbaserade gateway-enheter. Under uppdraget kan operatören få tillgång till uppdateringar om färdväg och status vid sin arbetsstation via en trådlös länk till gateway-enheten.

Riskdetektering och säkerhetsinsatser
Identifiering av faror såsom minor och oexploderade stridsmedel, till stöd för både civila och militära säkerhetsändamål.

Uppdragsövervakning och styrning
Farkosten förblir uppkopplad – både ovan och under ytan – vilket ger operatörerna fullständig överblick och kontroll under uppdragets alla faser. Innan dykningen tar farkostens hopfällbara multiantenn emot GNSS-positioner och upprättar trådlösa förbindelser med kontrollstationen.
Under uppdraget förser en akustisk förbindelse till en gateway på ytan – en stationär USBL-boj, en mobil Sonobot 5 USV eller ett fartyg utrustat med USBL – GNSS-signalerna med akustiska positionsdata och vidarebefordrar fordonets status till land. Genom den akustiska länken kan operatörerna justera waypoints, ladda upp ändrade uppdragsparametrar, avbryta eller avbryta uppdraget och initiera automatiserade återhämtningsprocedurer. Efter uppstigning till ytan är all insamlad data tillgänglig för trådlös nedladdning och analys efter uppdraget.
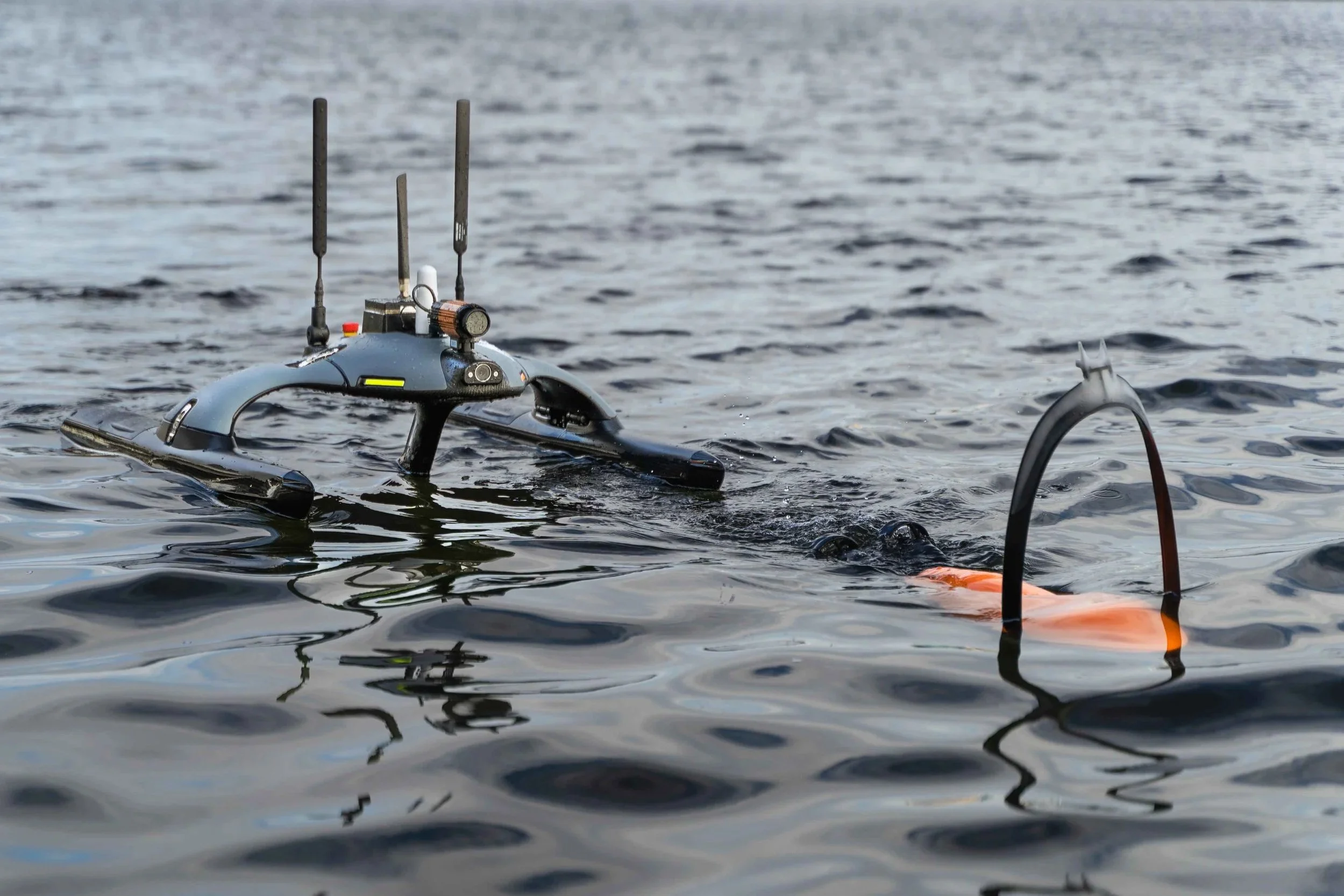
Sonobot 5 USV och Quadroin AUV

Svärmoperation med flera Quadroins
Samverkande nätverk med flera fordon.
Quadron kan konfigureras för att fungera som en del av samordnade uppdrag med flera fordon. Quadrons AUV:er, Sonobots USV:er och EvoLogics dykarnavigeringssystem kopplas samman med ytstationer till en hybridstyrka bestående av robotar och dykare. Med hjälp av Quadrons uppdateringar om upptäckta objekt kan dykarna ledas till fynden för bedömning på plats, vilket möjliggör effektiva och tidsbesparande inspektioner.
